ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(14)___在gmapping下使用激光雷达进行建图
-
1、 vnc登录小强主机
2、启动gmapping节点
确保雷达安装正确,vnc进入小强主机后启动gmapping中的launch文件
如果是rplidar a1或者a2 roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launch # 如果是rplidar a3则启动 roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a3.launch # 如果是星秒pavo激光雷达 roslaunch gmapping slam_gmapping_xiaoqiang_pavo.launch # 如果是镭神ls01b激光雷达 roslaunch gmapping slam_gmapping_xiaoqiang_ls01b.launch # 如果是国科sc-mini或国科tof激光雷达 roslaunch gmapping slam_gmapping_xiaoqiang_scmini.launch # 如果是timoo 16线3d激光雷达 或者速腾3d激光雷达 roslaunch gmapping slam_gmapping_xiaoqiang_timoo.launch机器人打开rviz,选择打开小强ros工作目录下的slam_gmapping/gmapping/launch/rplidar_a2_test.rviz配置文件
rviz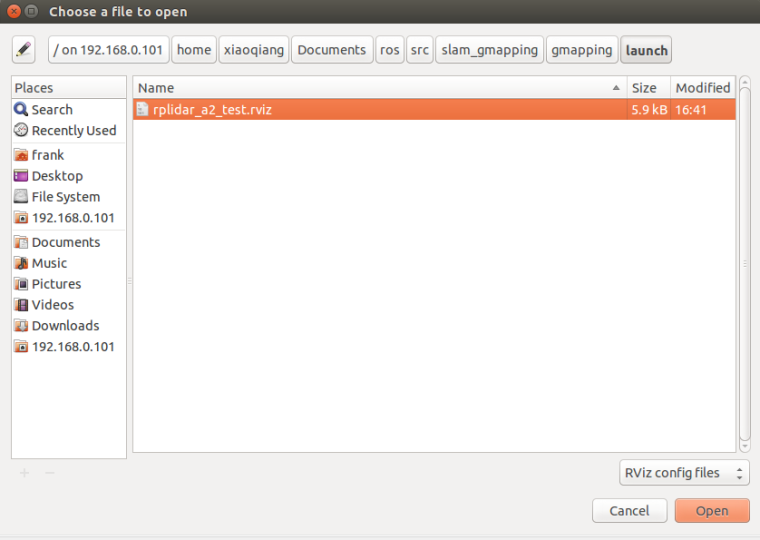
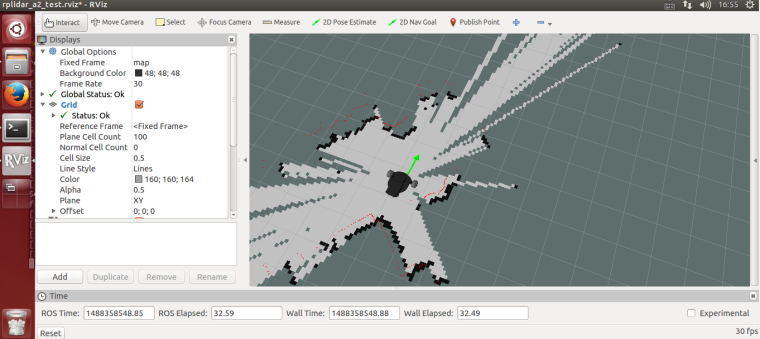
等待几秒,正常情况会出现下图的类似结果
3、遥控小强运动开始建图
第一种方式,使用windows遥控端,参考这篇帖子(小强图传遥控windows客户端)
第二种方式,使用手机app,参考这篇贴子(小强手机遥控app安卓版)
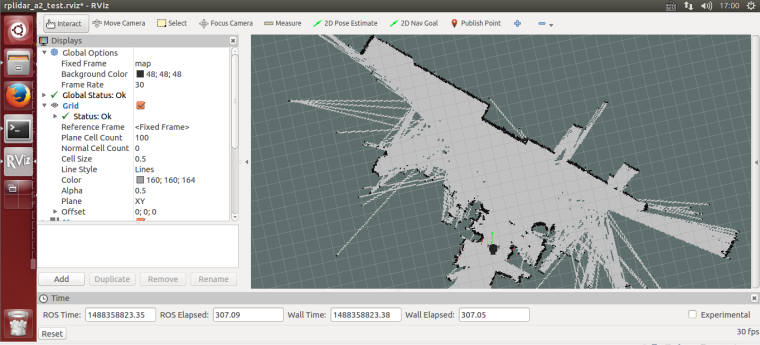
4、保存地图,本文结束
vnc登录小强,在小强home目录下保存为work0开头的文件
rosrun map_server map_saver -f work0