@weijiz 谢谢谢谢 我已经解决了
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
caom26 发布的最新帖子
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@bot 2. 在主机ros catkin工作空间中下载安装自动充电模块的ros驱动包
如果是已经配置好的小强用户,可以直接跳过本步骤。#假设catkin工作空间在~/Documents/ros
cd ~/Documents/ros
cd src/
git clone https://github.com/BlueWhaleRobot/bw_auto_dock.git
cd …
catkin_make我就是按照这个装的

-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
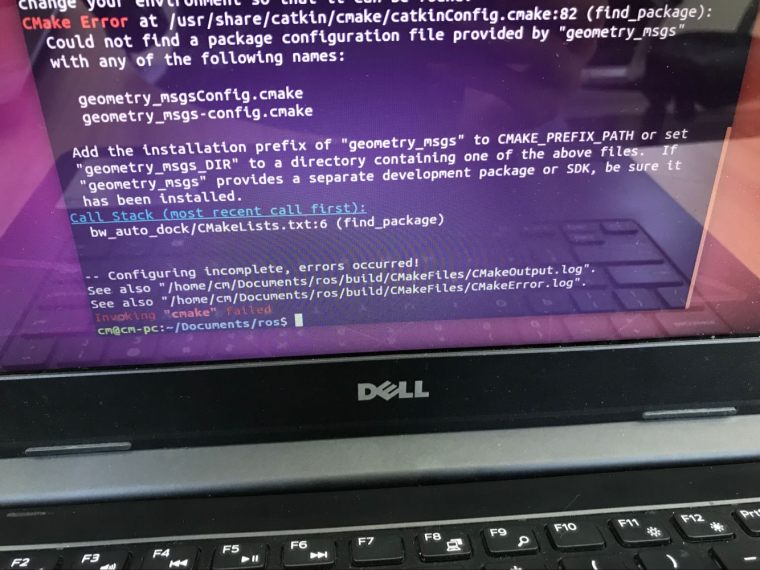
@weijiz 谢谢您!我试了一下 还是不行 可能不是这个版本的 请问如何修改呢 我是按照上面的步骤一步一步执行的