ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
rviz的简单使用
-
rviz是ros自带的一个图形化工具,可以方便的对ros的程序进行图形化操作。其使用也是比较简单。
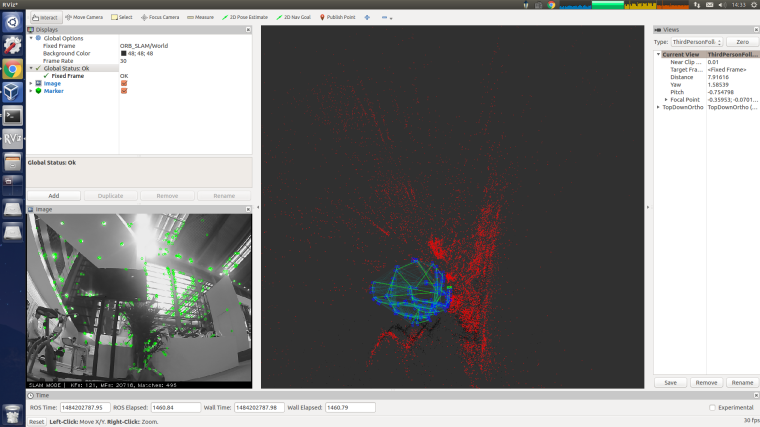
整体界面如下图所示
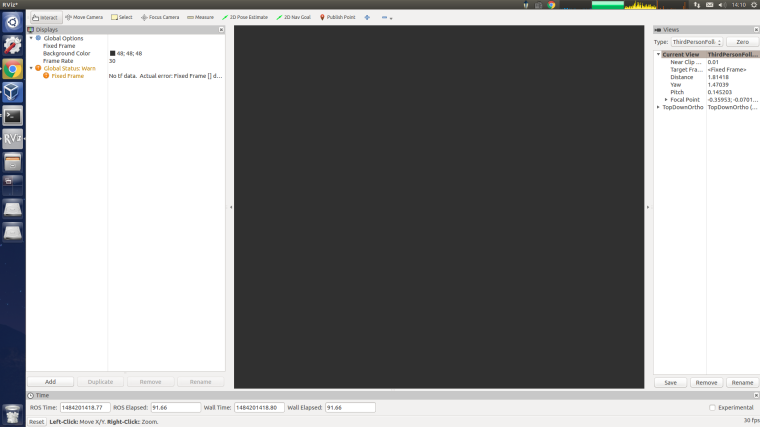
界面主要分为左侧的显示设置区域,中间的大的显示区域和右侧的视角设置区域。最上面是和导航相关的几个工具。最下面是ros状态相关的一些数据的显示。
下面以用rviz查看ORB_SLAM2的topic数据为例展示一下rviz的使用方法
启动ORB_SLAM程序
在终端依次输入
roscore roslaunch ORB_SLAM2 map.launch等待程序成功运行启动运行
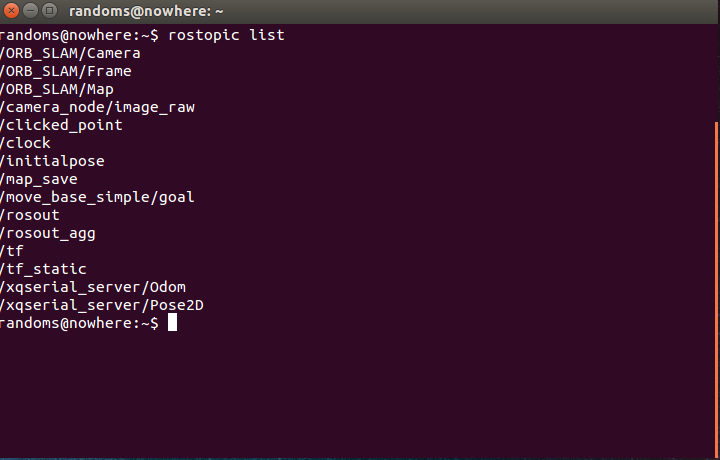
这时在终端输入rostopic list看到如下的输出则说明程序已经成功启动了
添加topic进入rviz
点击rviz左下角的添加按钮,弹出如下图所示的对话框
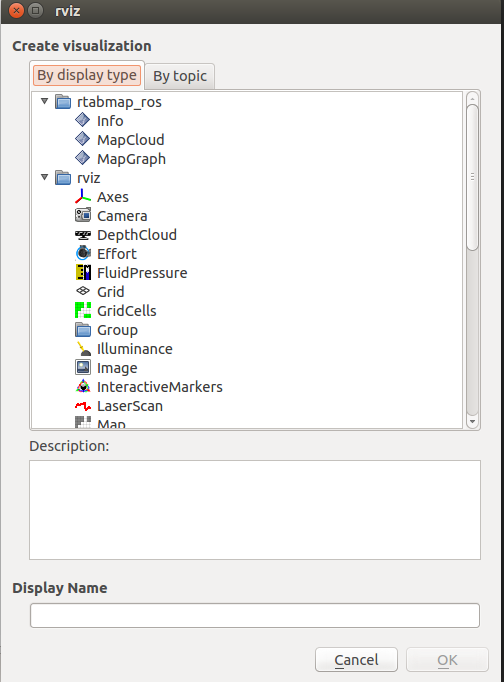
点击by topic,在下面的列表中选择ORB_SLAM相关的几个topic
这样就可以成功添加了
如果添加后出现如下图所示的错误
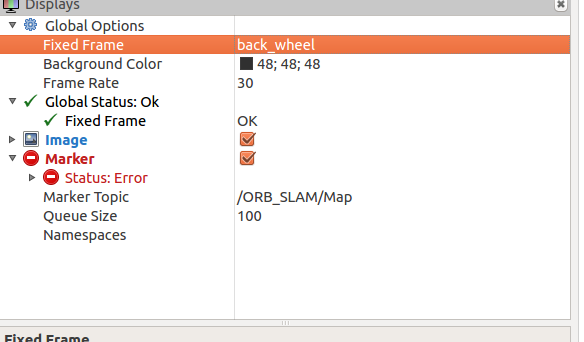
这是由于Glabal Options里面的坐标系设置有问题。将其改成对应的坐标系就可以了。其他的各种topic都可以通过这种方式方便的进行添加。
基本操作
中间区域显示的ORB_SLAM程序计算出的三维点云。可以通过鼠标左键拖动进行视角的调整。具体的操作方式在最下面的状态栏里面有提示。
右侧区域可以对视角进行更详细的设置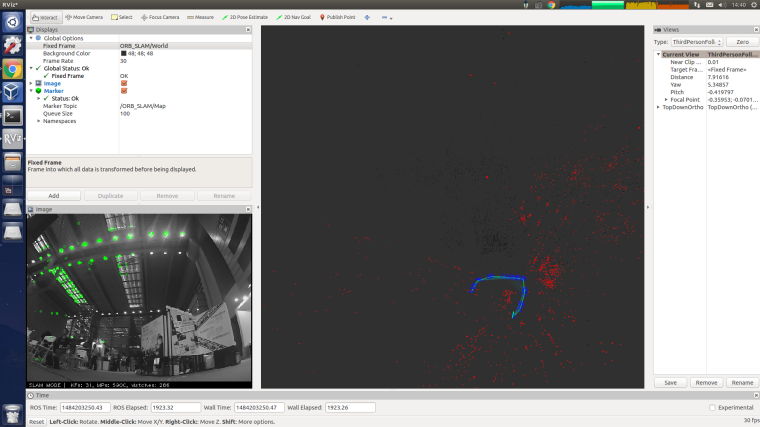
换个角度看一看保存设置
在配置完成之后,如果不想以后每次都要进行一样的配置,可以把配置文件保存起来。
在最上面的菜单中有保存的选项。更详细的rviz相关信息可以看官方的wiki