ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
systemd的简单使用
-
在linux系统中,经常需要开机自动启动一些程序,长时间的在后台运行。比如网站的后台程序,数据库程序等等。这些长时间运行的程序在系统中被称之为服务。对于服务的管理操作系统中有一套很完善的管理程序。可以保证服务开机后自动启动,服务程序崩溃后自动重启。对于更复杂的有服务程序间有依赖的情况也可以轻松的处理。下面就介绍一下这个管理程序如何使用。
以Ubuntu为例,Ubuntu在16.04之前的服务管理程序是upstart,在16.04之后都换成了systemd,两者的使用方法也比较类似,从一个系统迁移到另一个系统也比较容易。下面就介绍一下systemd的简单使用方法。
比如我们想要长时间的在后台执行一个程序,这个程序的路径是
/home/oumeng/Documents/SharpLink/SharpLink/bin/Debug/SharpLink.exe
我们想要这个程序开机后自动启动,那么就可以创建一个叫做toxserver.service的文件,文件内容如下[Unit] Description=Tox Server Daemon After=basic.target [Service] WorkingDirectory=/home/oumeng/Documents/SharpLink/SharpLink/bin/Debug ExecStart=/home/oumeng/Documents/SharpLink/SharpLink/bin/Debug/SharpLink.exe Restart=always [Install] WantedBy=basic.target这个文件的意义也是很明确的。首先在Unit部分中Description是服务程序的介绍,After是服务程序的执行条件。basic.target是一个系统定义的Unit。包含了系统启动相关的程序。
After=basic.target的含义就是开机后自动执行。然后就是Service的部分。
WorkingDirectory定义了环境目录,ExecStart就是这个服务程序的可执行文件路径。Restart是说服务崩溃的时候要不要重启。这里是设置成了Always,也就是服务要不断的重启。最后Install部分定义了这个服务的依赖关系。我们这个例子只依赖于
basic.target。这个把文件保存在
/usr/lib/systemd/system文件夹内就可以了。但是默认服务是没有Enable的。需要执行一条指令Enable一下才能正常使用。
sudo systemctl enable toxserver.service
启动服务程序
sudo service toxserver start
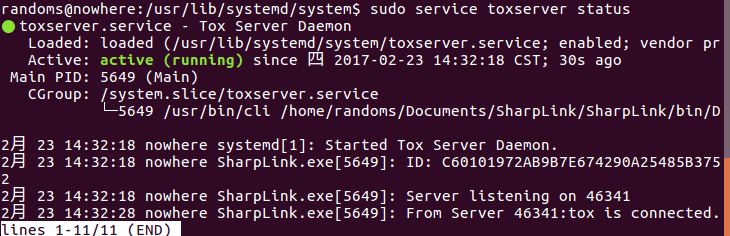
查看服务运行状态
sudo service toxserver status
执行结果如下图
关闭服务
sudo service toxserver stop
禁用服务
sudo systemctl disable toxserver.service
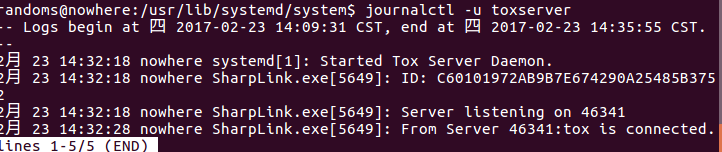
查看服务程序的日志文件
journalctl -u toxserver