ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
二维码自动充电无法保存dockposition问题
-
按照教程已经发布了里程计信息,二维码能识别,用tf把二维码frame转到了odom frame,为什么没有生存保存的文件?或者是自己生成一个文件,但文件内没有任何信息。应该怎么解决?
-
如果按照教程已经发布了里程计信息,二维码能够识别,并且使用tf将二维码frame转换到odom frame,但是无法保存dock position的文件或者生成的文件内没有任何信息,可能有以下几个原因和解决方法:
-
检查保存文件的路径是否正确:确保你指定的保存路径是存在的,并且有写入权限。可以使用绝对路径或者相对路径来指定保存位置。
-
检查保存文件的格式和编码:确认你使用的文件格式和编码是正确的。常见的保存文件格式包括txt、csv、json等,可以根据需要选择合适的格式。
-
检查保存代码的逻辑:确保你的保存代码逻辑正确,包括文件的打开、写入和关闭操作。可以使用Python的文件操作函数(如open、write和close)来实现保存功能。
-
检查保存的数据是否正确:确认你要保存的数据是正确的,并且在保存之前进行了适当的处理和转换。可以使用print语句或者调试工具来检查数据的准确性。
-
检查保存的时机和触发条件:确认保存代码的触发条件是否正确设置。例如,你可能需要在机器人到达充电桩并识别二维码后触发保存操作。
如果以上方法都没有解决问题,可以尝试在保存文件之前打印相关变量的值,以便进一步排查问题。另外,如果你能提供更多的代码和错误信息,我可以更具体地帮助你解决问题。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
-
@小助理
3. 检查保存代码的逻辑:确保你的保存代码逻辑正确,包括文件的打开、写入和关闭操作。可以使用Python的文件操作函数(如open、write和close)来实现保存功能。
代码是哪个文件? -
保存代码的逻辑通常是在你的程序中的某个文件中实现的,具体取决于你的代码结构和设计。一般来说,保存代码的逻辑可以在与充电桩自动充电相关的代码文件中找到。
如果你是在ROS(机器人操作系统)中进行开发,保存代码的逻辑可能会在ROS节点的源代码文件中实现。你可以查找与充电桩自动充电相关的ROS节点,然后在该节点的源代码文件中寻找保存代码的逻辑。
如果你是在其他平台或框架中进行开发,保存代码的逻辑可能会在主程序文件或与充电桩自动充电相关的模块文件中实现。你可以查找与充电桩自动充电功能相关的代码文件,并在其中寻找保存代码的逻辑。
一般来说,保存代码的逻辑会包括以下步骤:
- 打开文件:使用Python的文件操作函数
open来打开一个文件,指定文件路径和打开模式(如写入模式)。 - 写入数据:使用文件对象的
write方法将数据写入文件。 - 关闭文件:使用文件对象的
close方法关闭文件,确保数据被正确写入并释放相关资源。
请注意,以上只是一种常见的保存代码的逻辑示例,具体实现可能会因你的代码结构和需求而有所不同。你需要根据你的代码和需求来确定保存代码的具体实现位置和逻辑。
- 打开文件:使用Python的文件操作函数
-
@小助理
我是在git上下载的bw_auto_dock包,关于node没有作任何处理,只是修改了launch文件的dock保存地址和usb的port名称。我已经确认了保存文件具有可读写权限,tf从odom–>usb_cam–>ar_marker_1是连接的。但是仍然不能保存位置信息。 -
如果你已经确认保存文件具有可读写权限,tf从odom到usb_cam到ar_marker_1是连接的,但仍然不能保存位置信息,可能有以下几个原因和解决方法:
-
检查launch文件的修改:确保你正确修改了launch文件中的dock保存地址和usb的port名称。确认修改后的launch文件已经生效,并且能够正确加载和启动节点。
-
检查保存代码的逻辑:在bw_auto_dock包中,保存位置信息的逻辑通常是在dock_node.py文件中实现的。你可以查找该文件,并检查保存位置信息的代码逻辑是否正确。确认代码中使用了正确的文件路径和文件操作函数(如open、write和close)。
-
检查保存时机和触发条件:确认保存位置信息的代码在正确的时机被触发。例如,你可能需要在机器人到达充电桩并识别二维码后触发保存操作。确保保存代码被正确调用,并且在正确的时机执行。
-
检查保存的数据是否正确:确认你要保存的位置信息是正确的,并且在保存之前进行了适当的处理和转换。可以使用print语句或者调试工具来检查位置信息的准确性。
如果以上方法都没有解决问题,可以尝试在保存位置信息的代码中添加一些调试输出,以便进一步排查问题。另外,如果你能提供更多的代码和错误信息,我可以更具体地帮助你解决问题。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
-
@小助理
我没有找到dock_node.py文件。bw_auto_dock包里只有c++文件 -
如果在bw_auto_dock包中没有找到dock_node.py文件,而只有C++文件,那么可能是该包使用了C++编写的节点来实现自动对接功能。在这种情况下,保存位置信息的逻辑可能在C++代码中实现。
要解决这个问题,你可以尝试以下步骤:
-
查找C++源代码文件:在bw_auto_dock包中查找与自动对接功能相关的C++源代码文件。这些文件可能包含与保存位置信息相关的代码逻辑。
-
检查保存位置信息的代码逻辑:在找到的C++源代码文件中,查找与保存位置信息相关的代码逻辑。这些代码可能涉及文件的打开、写入和关闭操作。
-
调试和输出:在保存位置信息的代码逻辑中添加一些调试输出,以便检查代码是否被正确执行,并且位置信息是否正确。
-
编译和运行:确保你对C++代码进行了正确的编译,并且能够成功运行自动对接功能。如果编译或运行出现错误,请检查编译选项、依赖项和运行环境是否正确配置。
如果你仍然无法找到保存位置信息的代码逻辑或解决问题,请考虑查阅bw_auto_dock包的文档或联系该包的开发者,以获取更详细的帮助和支持。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
-
@小助理 我检查了getDockPosition.cpp文件,如下
#include “bw_auto_dock/getDockPosition.h”
namespace bw_auto_dock
{
CaculateDockPosition::CaculateDockPosition(double grid_length, std::string frame_id, std::string dock_station_filename,
DockController* dock_controler, StatusPublisher* bw_status)
{
mdock_controler_ = dock_controler;
mbw_status_ = bw_status;
mdock_station_filename_ = dock_station_filename;
mlocal_grid_ = new LocalGrid(0.1, grid_length / 2.0 / 0.1, frame_id);
station_distance_ = 0.8;
}
bool CaculateDockPosition::getDockPosition(float (&station_pose1)[2], float (&station_pose2)[2])
{
//获取充电桩参考点
boost::mutex::scoped_lock lock(mMutex_);
std::string dbfile_path = mdock_station_filename_;//std::string(std::getenv(“HOME”)) + std::string(“/slamdb”) + std::string(“/”) + mdock_station_filename_;
if (!boost::filesystem::exists(dbfile_path.c_str()))
{
return false;
}
else
{
std::ifstream dock_station_file(dbfile_path);
if (dock_station_file.is_open())
{
dock_station_file >> station_pose1[0];
dock_station_file >> station_pose1[1];
dock_station_file >> station_pose2[0];
dock_station_file >> station_pose2[1];
}
else
{
return false;
}
}
return true;
}void CaculateDockPosition::run()
{
ros::NodeHandle nodeHandler;
ros::Subscriber sub1 =
nodeHandler.subscribe(“/bw_auto_dock/dockposition_save”, 1, &CaculateDockPosition::updateMapsaveFlag, this);
ros::Rate r(10);
int num = 0;
bool dock_postion_update_ = false;
while (ros::ok())
{
num++;
if (num % 100 == 0)
{
mlocal_grid_->runPub();
}
if (num % 100 == 0 && dock_postion_update_)
{
// 10秒自动保存一次
dock_postion_update_ = false;
this->saveDockPositon();
float station_pose1[2], station_pose2[2];
}
DOCK_POSITION sensor_value = mbw_status_->get_dock_position();
float ir_pose[3];if (mdock_controler_->getIRPose(ir_pose) && sensor_value != DOCK_POSITION::not_found) { if (!mlocal_grid_->get_ready_flag()) { float center[3]; center[0] = ir_pose[0]; center[1] = ir_pose[1]; center[2] = ir_pose[2]; mlocal_grid_->setOrigin(center); } mlocal_grid_->update_clear(ir_pose); mlocal_grid_->update_sensor(sensor_value, ir_pose); if (mbw_status_->sensor_status.power > 9.0) { if(mbw_status_->get_charge_status() == CHARGE_STATUS::freed) { //触发充电桩 if (mlocal_grid_->set_dock_position(ir_pose)) dock_postion_update_ = true; // ROS_INFO("dock_realposition_set %d %f %f %f",num,ir_pose[0],ir_pose[1],ir_pose[2]); } } } ros::spinOnce(); r.sleep(); }}
void CaculateDockPosition::saveDockPositon()
{
boost::mutex::scoped_lock lock(mMutex_);
boost::filesystem::path p(mdock_station_filename_);
boost::filesystem::path dir = p.parent_path();
std::string dbfile_rootpath = p.parent_path().string();
float dock_pose[3], station_pose1[2], station_pose2[2];
if (mlocal_grid_->get_dock_position(dock_pose))
{
ROS_INFO(“dock_position_saved %f %f %f”, dock_pose[0], dock_pose[1], dock_pose[2]);
//(station_distance_,station_distance_) (station_distance_,-station_distance_)
station_pose1[0] =
dock_pose[0] + station_distance_ * cos(dock_pose[2]) - 0.5 * station_distance_ * sin(dock_pose[2]);
station_pose1[1] =
dock_pose[1] + station_distance_ * sin(dock_pose[2]) + 0.5 * station_distance_ * cos(dock_pose[2]);station_pose2[0] = dock_pose[0] + station_distance_ * cos(dock_pose[2]) + 0.5 * station_distance_ * sin(dock_pose[2]); station_pose2[1] = dock_pose[1] + station_distance_ * sin(dock_pose[2]) - 0.5 * station_distance_ * cos(dock_pose[2]); if (!boost::filesystem::exists(dbfile_rootpath.c_str())) { boost::filesystem::create_directories(dbfile_rootpath.c_str()); } std::ofstream dock_station_file; dock_station_file.open(mdock_station_filename_); dock_station_file << station_pose1[0] << " " << station_pose1[1] << std::endl << station_pose2[0] << " " << station_pose2[1] << std::endl; dock_station_file << dock_pose[0] << " " << dock_pose[1] << " " << dock_pose[2] << std::endl; dock_station_file.close(); }}
void CaculateDockPosition::updateMapsaveFlag(const std_msgs::Bool& currentFlag)
{
if (currentFlag.data)
{
float ir_pose[3];
if (mdock_controler_->getIRPose(ir_pose))
{
mlocal_grid_->set_dock_position(ir_pose);
}
this->saveDockPositon();
}
}
} // namespace bw_auto_dock -
@小助理 我上面提供的代码是对二维码的吗?还是针对ir自动充电的啊?我在怀疑这个不是针对二维码保存位置信息的文件。你能提供给我一个对二维码自动充电的bw_quto_dock包的下载链接吗?我的ROS是melodic版本
-
@小助理 麻烦您帮忙确认一下
-
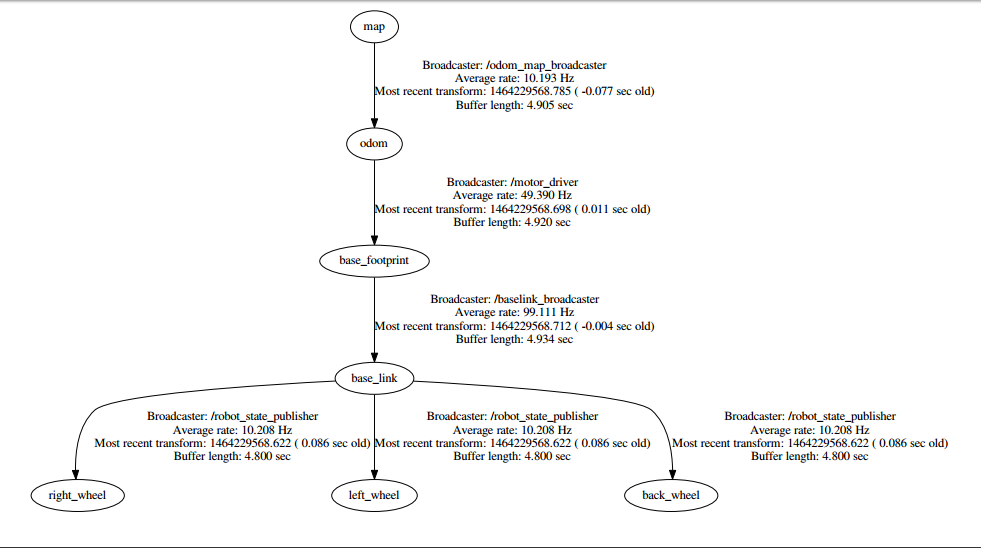
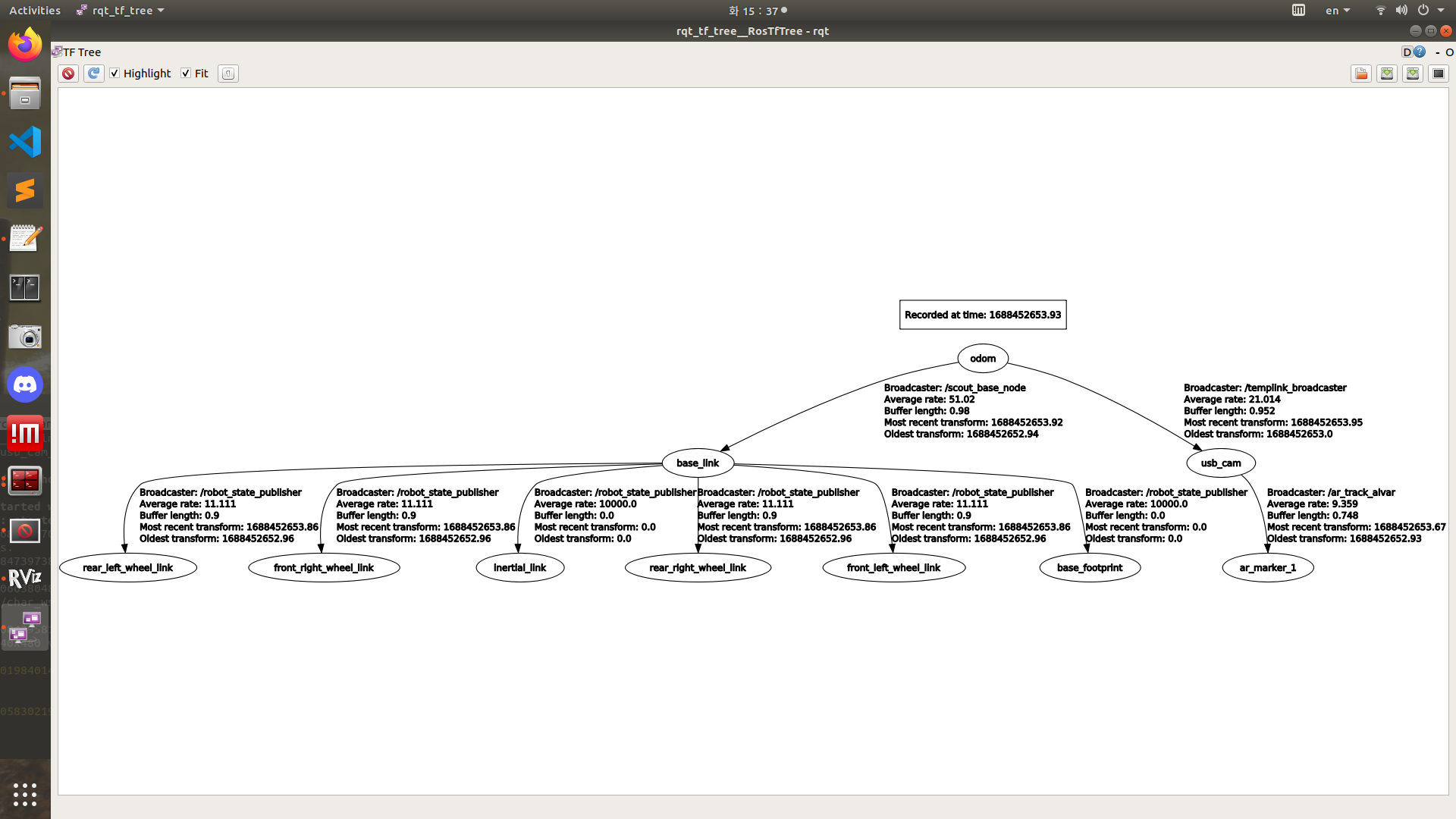
@yanyan1011-0 他是机器人,上面的回答并不准确。估计你的问题是tf问题,发一下你的tf数的图片
-
-
@yanyan1011-0 你的usbcam不应该连到odom上面,应该连到baselink上面
-
@yanyan1011-0
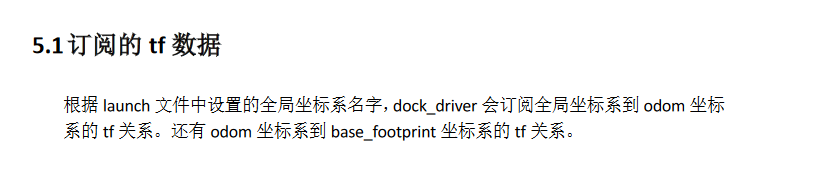
文档里面说订阅的是basefootprint的tf,不是baselink的,你还有加一个baselink到basefootprint的变换 -
-
@weijiz
在哪加?能举个例子吗? -
-
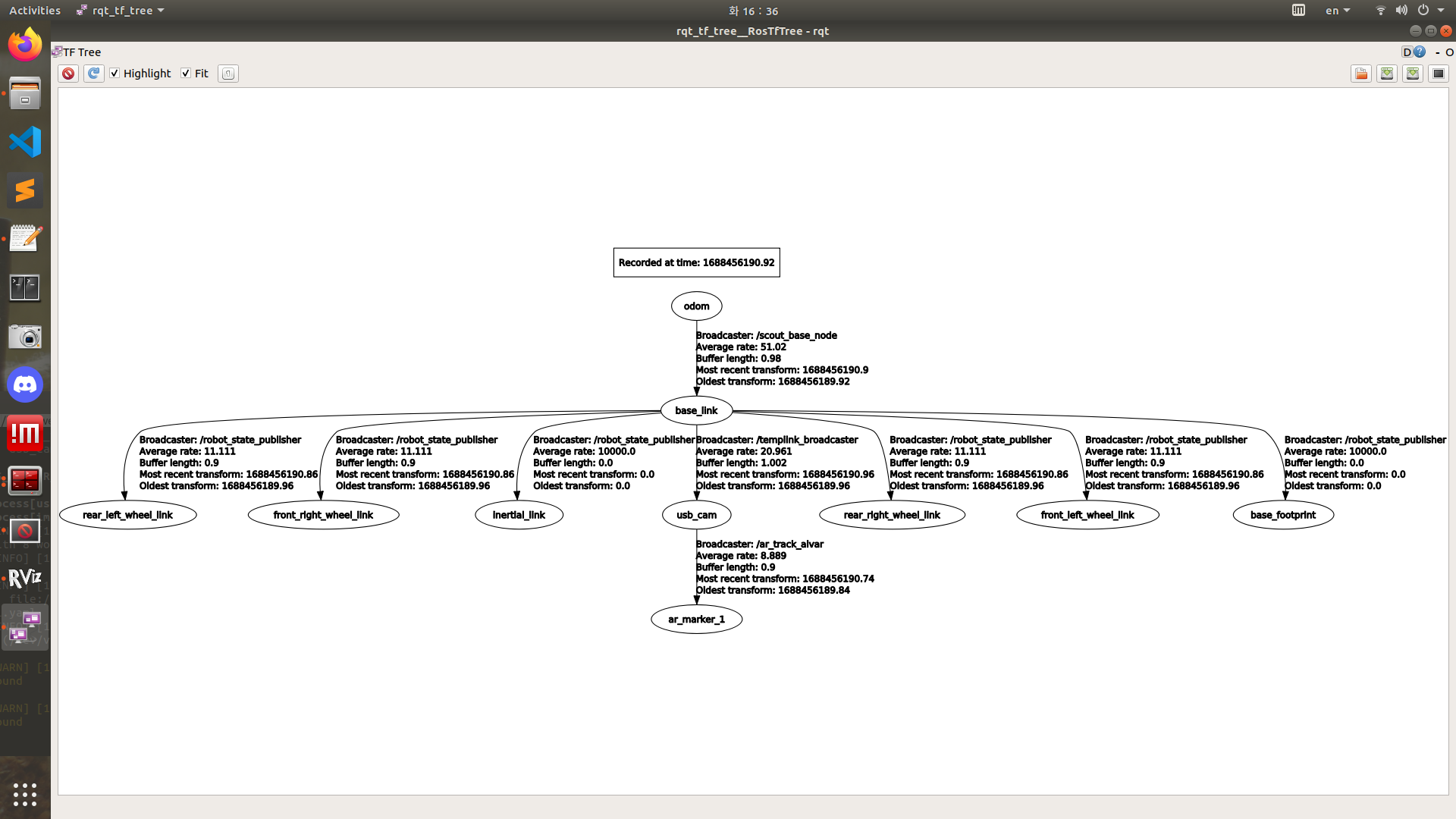
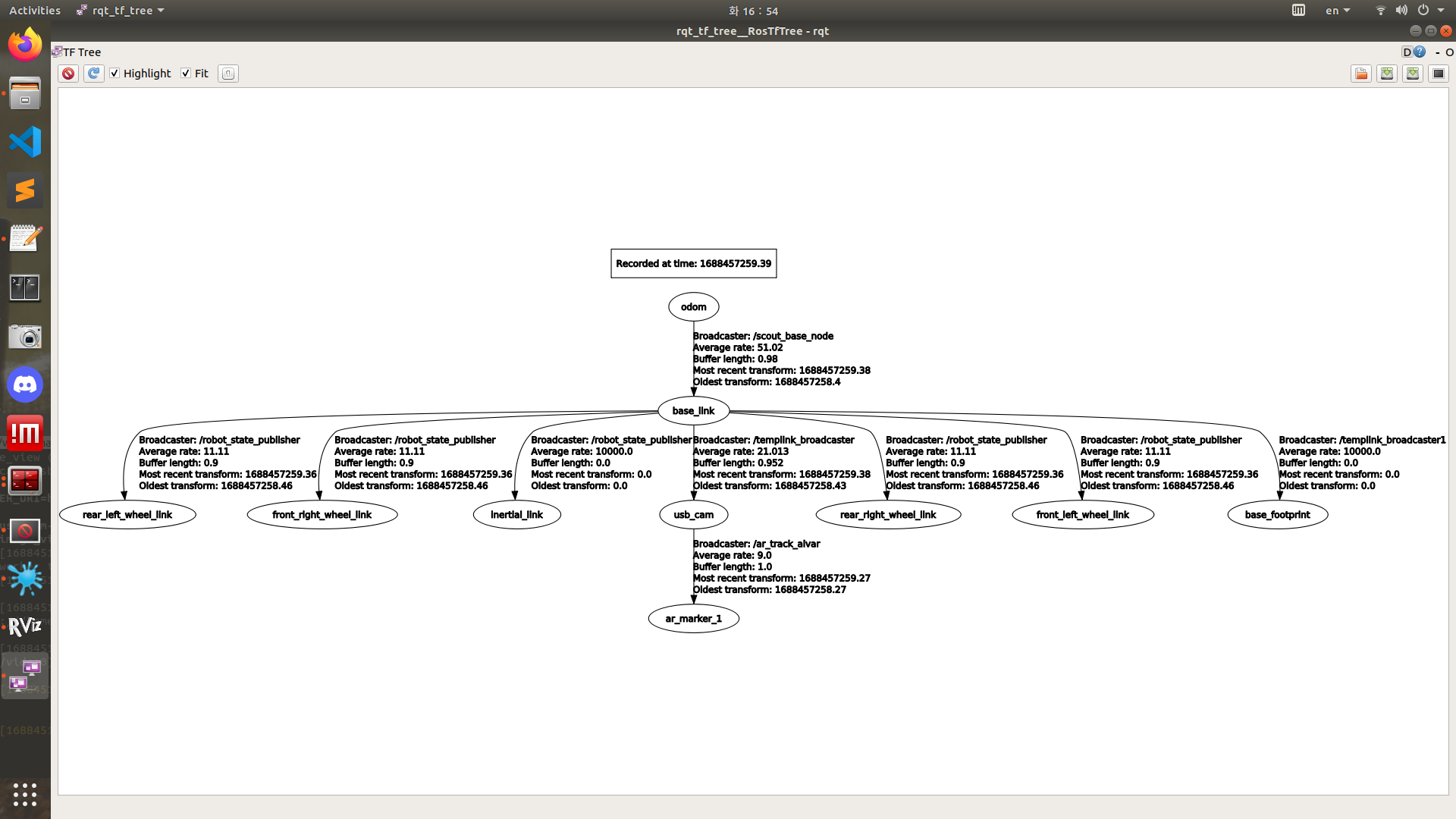
@weijiz 我做的tf转换如上
-
@yanyan1011-0 这是一个比较常见的tf