ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(15)___AMCL导航测试
-
下文将演示AMCL导航操作,使用rplidar a2作为scan输入,教程14中建立的地图文件作为全局map
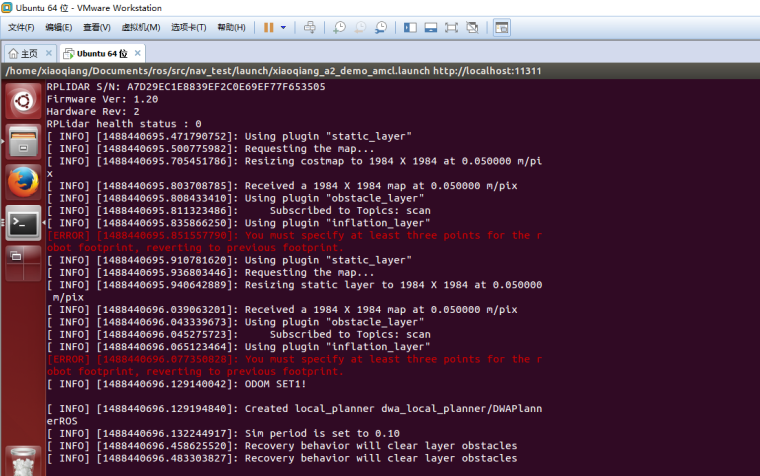
启动导航节点
先将教程14中建立的两个map文件拷贝到/home/xiaoqiang/Documents/ros/src/nav_test/maps/下,覆盖同名文件即可# 对于rplidar a1或者a2 roslaunch nav_test xiaoqiang_a2_demo_amcl.launch # 对于rplidar a3 roslaunch nav_test xiaoqiang_a3_demo_amcl.launch # 对于星秒pavo激光雷达 roslaunch nav_test xiaoqiang_pavo_demo_amcl.launch # 对于镭神ls01b激光雷达 roslaunch nav_test xiaoqiang_ls01b_demo_amcl.launch # 对于国科sc-mini或国科tof激光雷达 roslaunch nav_test xiaoqiang_scmini_demo_amcl.launch # 对于timoo 16线3d激光雷达 或者速腾3d激光雷达 roslaunch nav_test xiaoqiang_timoo_demo_amcl.launch正常会出现下图的类似结果,同时雷达开始旋转
三、打开操作客户端
1.在机器人中启动rviz,选择打开小强ros工作目录下的
nav_test/config/xiaoqiang_amcl.rviz配置文件rviz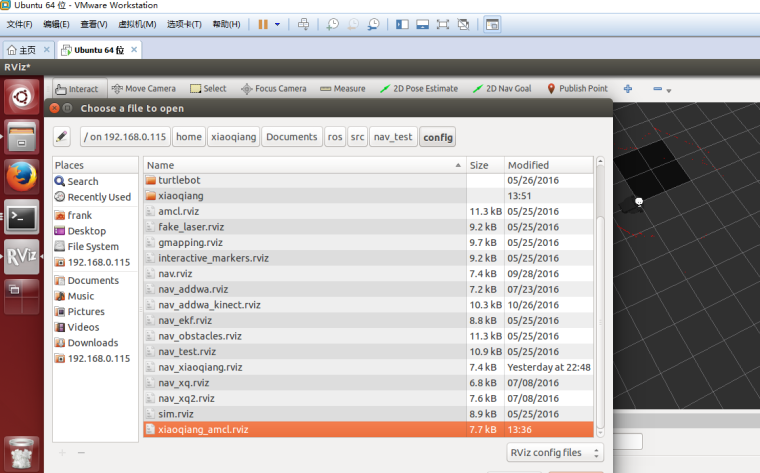
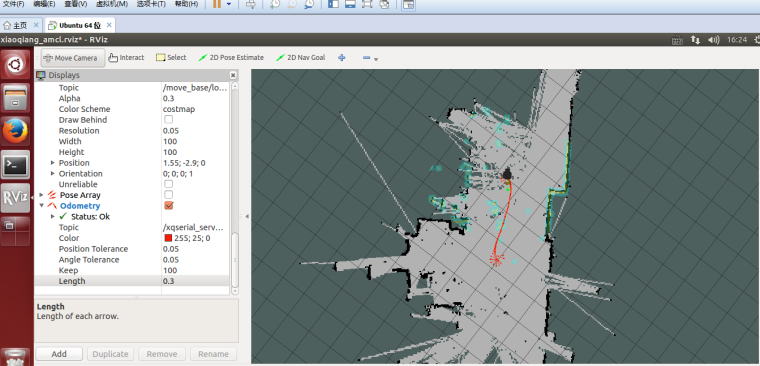
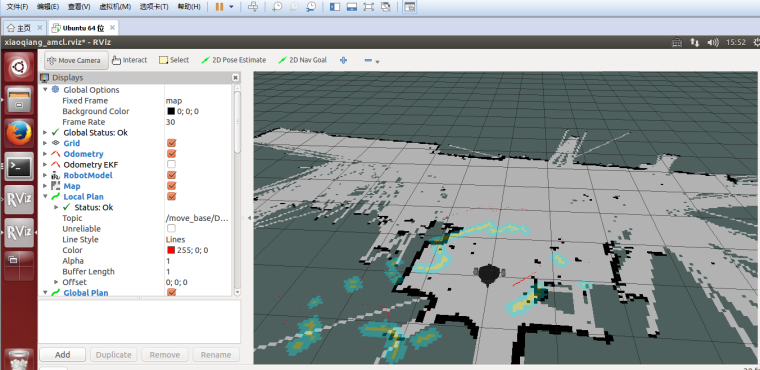
2.等待几秒后,rviz正常会出现类似下图的界面
四、开始导航测试
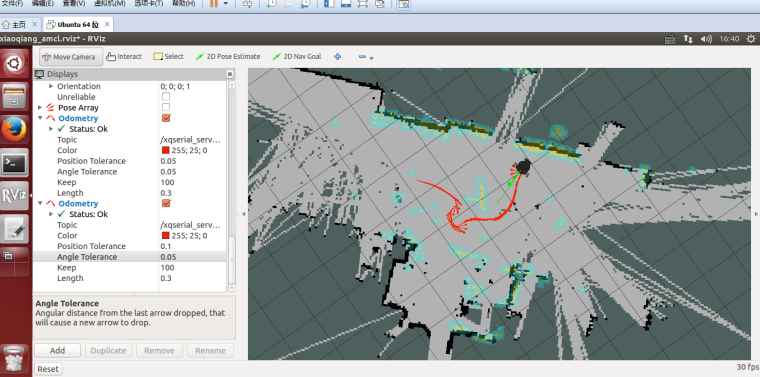
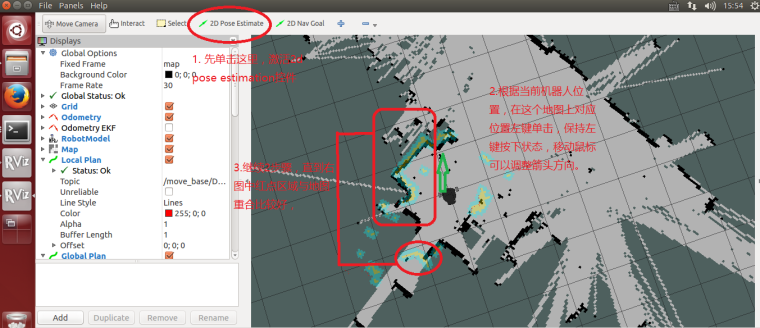
1.在rviz中使用2D Pose Estimation设置机器人的初始pose在map中的位置,因为AMCL算法需要一个较为精确的初始值,才能进一步由当前雷达扫描点阵匹配出机器人在map中的真实位置。
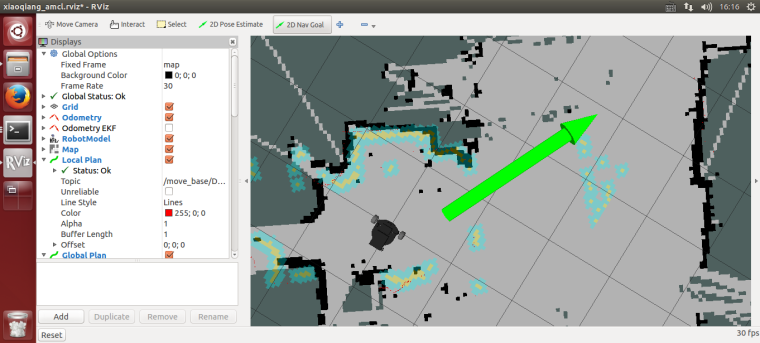
2.在rviz中使用2D Nav Goal 给小强发布目标点
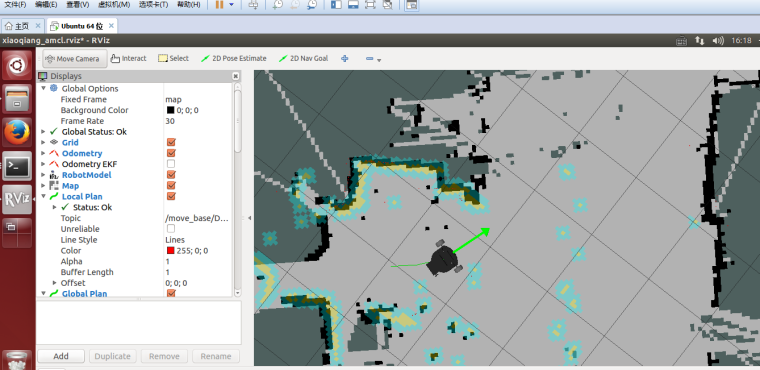
3.小强开始自主移动到指定位置
五、请自由设置小强的2D Nav Goal,观察小强的运动情况,本文结束