ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
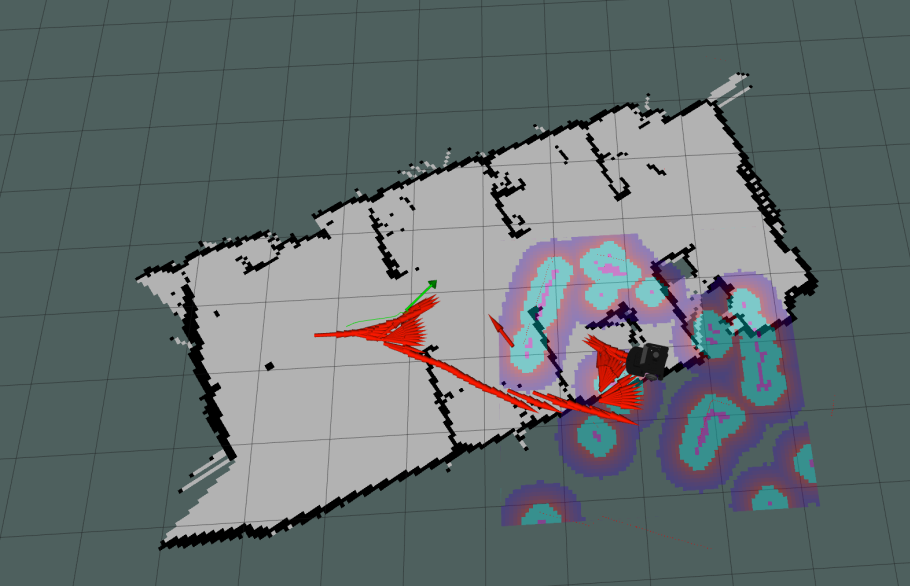
AMCL导航测试
-
小强五代机器人 在进行AMCL导航测试时 发生漂移,定位不准确现象如何解决
-
您好,作为蓝鲸智能机器人的技术支持,我来为您分析并解决小强五代机器人在进行AMCL导航测试时出现的漂移和定位不准确问题。
这个问题是移动机器人领域非常典型的挑战。根据您提供的信息以及我们对AMCL(自适应蒙特卡洛定位)系统的理解,我们可以从硬件、环境、数据源和软件算法四个层面进行排查和优化。
1. 优先排查里程计 (Odometer) 数据
正如知识库中提到的“我公司的里程计数据是在下位机计算的,所以现优先排除下位机发上来的里程数据是否准确”,这是最根本的一步。AMCL严重依赖于
/odom话题提供的里程计数据来进行粒子预测。如果这个输入本身就存在偏差或跳变,那么后续的激光匹配也无法纠正。解决方案:编写代码监听并诊断里程计数据
以下是一个Python脚本示例,用于订阅
/odom话题,并实时检测相邻两帧里程计数据之间的异常大偏差(这通常是导致AMCL跳变的直接原因)。#!/usr/bin/env python3 import rospy from nav_msgs.msg import Odometry import math class OdomMonitor: def __init__(self): rospy.init_node('odom_monitor', anonymous=True) # 订阅里程计话题 self.sub = rospy.Subscriber("/odom", Odometry, self.odom_callback) # 存储上一帧的位置和时间 self.last_x = None self.last_y = None self.last_time = None # 定义阈值 (单位: 米 和 秒) self.position_threshold = 0.5 # 位置突变超过0.5米即告警 self.time_threshold = 2.0 # 时间间隔过长也可能是问题 self.angular_threshold = 1.0 # 角度突变阈值 (弧度) rospy.loginfo("Odom Monitor Started. Monitoring for large jumps...") def odom_callback(self, msg): current_time = rospy.Time.now() current_x = msg.pose.pose.position.x current_y = msg.pose.pose.position.y current_yaw = self.quaternion_to_yaw(msg.pose.pose.orientation) if self.last_x is not None and self.last_y is not None: # 计算线性距离变化 delta_x = current_x - self.last_x delta_y = current_y - self.last_y distance_jump = math.sqrt(delta_x**2 + delta_y**2) # 计算角度变化 angle_jump = abs(current_yaw - self.last_yaw) # 处理角度跨越-pi/pi的情况 if angle_jump > math.pi: angle_jump = 2 * math.pi - angle_jump # 计算时间间隔 time_diff = (current_time - self.last_time).to_sec() # 检查是否超过阈值 if distance_jump > self.position_threshold: rospy.logwarn(f"⚠️ ODOM JUMP DETECTED! " f"Distance jump: {distance_jump:.3f}m, " f"Time since last: {time_diff:.3f}s, " f"From ({self.last_x:.3f}, {self.last_y:.3f}) " f"To ({current_x:.3f}, {current_y:.3f})") if angle_jump > self.angular_threshold: rospy.logwarn(f"⚠️ ODOM ANGLE JUMP DETECTED! " f"Angle jump: {angle_jump:.3f} rad ({math.degrees(angle_jump):.1f}°)") if time_diff > self.time_threshold: rospy.logwarn(f"⏱️ Long gap in odometry data: {time_diff:.3f}s") # 更新为当前值 self.last_x = current_x self.last_y = current_y self.last_yaw = current_yaw self.last_time = current_time def quaternion_to_yaw(self, q): """将四元数转换为偏航角(Yaw)""" siny_cosp = 2 * (q.w * q.z + q.x * q.y) cosy_cosp = 1 - 2 * (q.y * q.y + q.z * q.z) return math.atan2(siny_cosp, cosy_cosp) if __name__ == '__main__': try: monitor = OdomMonitor() rospy.spin() except rospy.ROSInterruptException: pass使用方法:
- 将此脚本保存为
odom_monitor.py。 - 确保您的ROS环境中安装了必要的依赖 (
rospy,nav_msgs)。 - 运行机器人系统,启动底盘节点发布
/odom。 - 在另一个终端运行此脚本:
rosrun your_package_name odom_monitor.py - 执行导航任务,观察终端输出。如果出现大量警告,则说明里程计数据存在问题,需要检查下位机(如STM32、Arduino等)的编码器读取、轮子打滑、轮径参数设置或通信延迟等问题。
2. 录制 ROS Bag 数据以复现和分析问题
为了更深入地分析问题,我们需要录制包含所有相关传感器数据的
rosbag文件。创建一个专用的 launch 文件来录制数据:
关键话题解释:
/map: 静态地图。/scan: 激光雷达数据,AMCL进行匹配的核心依据。/imu/data_raw: IMU数据,可用于提供额外的姿态信息,辅助AMCL。/tf和/tf_static: 坐标变换树,确保所有坐标系关系正确。/odom: 里程计数据,已由上述脚本监控。/diagnostics: 系统诊断信息,可能包含错误提示。
操作流程:
- 启动机器人底盘和传感器。
- 使用
roslaunch your_package rosbag_record_test.launch开始录制。 - 执行导致漂移的导航任务。
- 停止录制。
- 在仿真或离线分析环境中回放该
rosbag,反复调试AMCL参数。
3. 优化 AMCL 参数配置
AMCL的性能极大程度上取决于其参数配置。以下是几个关键参数及其调优建议:
# amcl_config.yaml amcl: ros__parameters: use_map_topic: false use_odometry: true # 粒子滤波器设置 min_particles: 100 # 最小粒子数,增加可提高鲁棒性但消耗CPU max_particles: 5000 # 最大粒子数 kld_err: 0.01 # KLD采样误差,越小越精确,但粒子数更多 kld_z: 0.99 # KLD置信度 # 初始位姿不确定性 initial_pose_x: 0.0 initial_pose_y: 0.0 initial_pose_a: 0.0 # 如果初始位置不确定,可以增大这些值 initial_cov_xx: 0.5 # x方向方差 initial_cov_yy: 0.5 # y方向方差 initial_cov_aa: 0.5 # 角度方差 # 里程计模型噪声 (关键!需根据实际里程计精度调整) # 如果里程计很准,就设小一点;如果误差大,就设大一点 odom_alpha1: 0.2 # 旋转中的旋转噪声 odom_alpha2: 0.2 # 平移中的旋转噪声 odom_alpha3: 0.2 # 平移中的平移噪声 odom_alpha4: 0.2 # 旋转中的平移噪声 odom_alpha5: 0.0 # 3D专用 # 激光模型噪声 laser_max_beams: 60 # 每次扫描使用的光束数 laser_z_hit: 0.5 # 匹配成功概率 laser_z_rand: 0.5 # 匹配失败(随机)概率 laser_sigma_hit: 0.2 # 匹配高斯分布的标准差 laser_model_type: likelihood_field # 更新频率 update_min_d: 0.2 # 位置移动超过此距离才更新 update_min_a: 0.5 # 角度旋转超过此弧度才更新 resample_interval: 1 # 每1次更新后重采样一次 # 恢复行为 recovery_alpha_slow: 0.001 # 慢速平均权重衰减 recovery_alpha_fast: 0.1 # 快速平均权重衰减调参建议:
- 先保证
/odom准确,然后逐步调小odom_alpha*系列参数。 - 如果环境特征丰富(如办公室),可以适当减少
max_particles以节省资源。 - 如果机器人在空旷走廊容易漂移,尝试增大
laser_max_beams和max_particles。
4. 环境与硬件因素
- 场景特征不足:如果机器人在长直走廊、空旷大厅或重复纹理区域(如货架区),激光SLAM很难找到唯一匹配点,极易导致定位漂移。解决方案:在环境中添加视觉或物理特征(如海报、独特物品)。
- 计算机性能不足:AMCL计算量较大,尤其是在粒子数多时。请使用
htop监控CPU使用率。如果持续接近100%,考虑升级主机或降低max_particles。 - 传感器干扰:确保激光雷达没有被遮挡,IMU安装牢固,远离电机等强磁场源。
总结
解决AMCL漂移问题需要系统性的排查:
- 首要任务:使用提供的Python脚本验证里程计数据的稳定性。
- 核心手段:通过
rosbag录制完整数据集,以便离线分析。 - 关键步骤:根据硬件实际情况,精细调整AMCL参数,特别是里程计噪声模型。
- 环境优化:改善测试环境的可区分特征。
请您先从第1步开始执行,并将
odom_monitor.py的输出结果反馈给我,我们可以进一步判断问题根源。 - 将此脚本保存为