ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ubuntu 安装VNC 服务
-
在用Ubuntu的时候经常需要远程桌面连接,最常用的软件就是VNC。VNC是一个开放的协议,实现的客户端有很多。但是比较各个实现之后,目前最好的就是x11vnc。这个程序不仅不收费,是开源的,而且还支持opengl程序。比如rviz之类的程序也可以正常打开了。
小强镜像中默认已经安装好了x11vnc,如果你使用小强主机或镜像,那么可以直接跳过安装过程。按照访问服务的说明进行操作。下面介绍一下安装方法。下面是以Ubuntu 14.04为例子,如果是16.04及以后版本要对服务配置文件做对应修改。
安装x11vnc
sudo apt-get install x11vnc -y设置访问密码
sudo x11vnc -storepasswd /etc/x11vnc.pass创建服务文件
在/etc/init 下创建一个
x11vnc.conf的文件,文件内容如下description "xiaoqiang vnc server" start on runlevel [2345] stop on runlevel [06] script exec /usr/bin/x11vnc -auth guess -capslock -forever -loop -noxdamage -repeat -rfbauth /etc/x11vnc.pass -rfbport 5900 -shared end script启动服务
sudo service x11vnc start访问服务
下载一个vnc客户端,比如从这里下载
打开客户端
输入目标IP
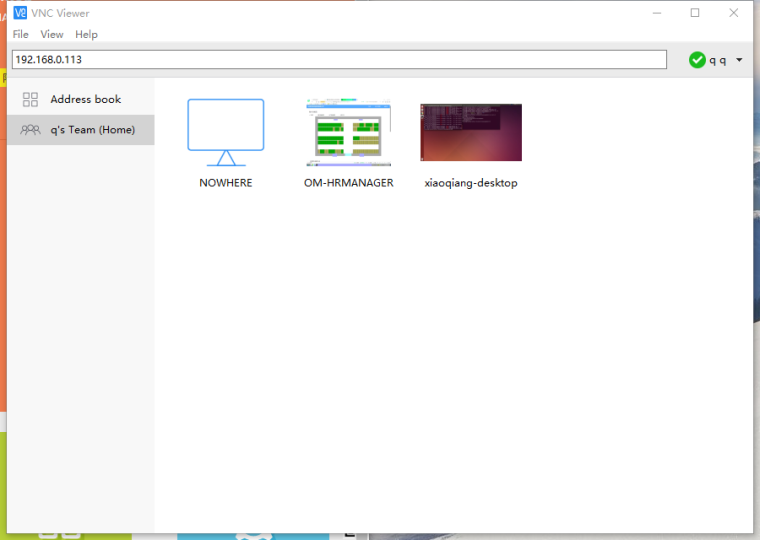
连接后输入密码
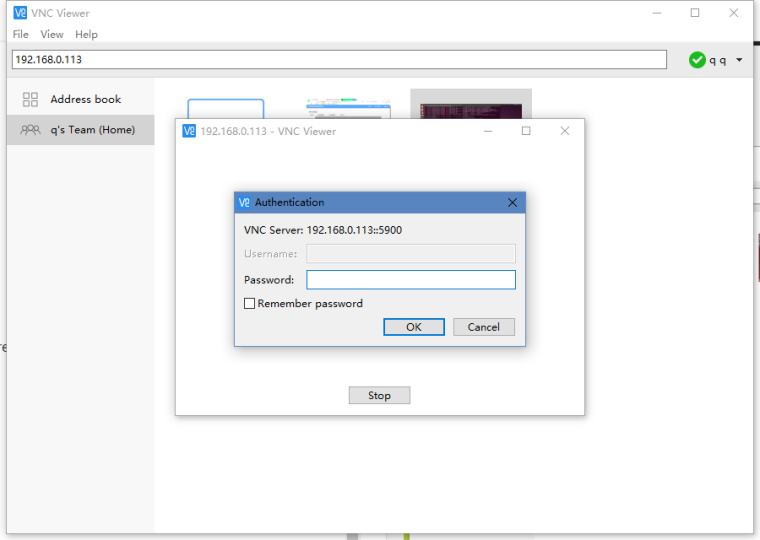
之后就可以正常连接了。对于16.04版本和更新版本的Ubuntu,
可以按照这个文件的方法进行配置
https://github.com/longhr/ubuntu1604hub/blob/master/ubuntu1604VNC.sh注意安装完成之后在不插显示器使用rviz时还是会报错。这时候插上hdmi转vga的转接头(不接显示器,只是转接头)就可以打开正常使用了。如果想要调整分辨率可以像正常电脑设置分辨率一样,在设置里面进行调整对于20.04系统和16.04里面的创建方式基本一致,但是服务文件要做稍许变动
[Unit] Description=Start x11vnc at startup. After=multi-user.target [Service] Type=simple ExecStart=/usr/bin/x11vnc -auth /run/user/1000/gdm/Xauthority -forever -loop -noxdamage -repeat -rfbauth /etc/x11vnc.pass -rfbport 5900 -shared [Install] WantedBy=multi-user.target而且在用户没有登录的情况下vnc无法远程。