ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
autowifi 发布
-
在第一次拿到小强时,必须连接到网络才能进行一系列的操作。而想要连接网络必须要给小强连接显示器。这对于很多用户来说是很不方便的事情。有了autowif就可以很好的解决这个问题了。
硬件要求
有无线网卡
安装方法
1.电脑端安装
在新版的蓝鲸ROS中已经安装完成,可以直接使用git clone http://randoms@git.bwbot.org/publish/autoWifi.git cd autoWifi virtualenv venv source venv/bin/activate pip install -r requirement.txt添加服务
对于Ubuntu 16.04 及以后的系统,在/usr/lib/systemd/system文件夹创建autowifi.service。内容如下[Unit] Description=auto Wifi service daemon After=network.target [Service] WorkingDirectory=/home/randoms/Documents/ros/src/autoWifi ExecStart=/home/randoms/Documents/ros/src/autoWifi/start.sh Restart=always [Install] WantedBy=network.target注意把路径改成自己对应的路径
启动服务
sudo systemctl enable autowifi.service sudo systemctl start autowifi.service2.手机端安装
下载安装最上面的那个apk就可以了。使用方法
在电脑端运行autowifi的情况下。如果现在电脑端没有网络连接。我们就可以通过操作手机客户端,控制电脑端连接上无线网络。
手机连接上想要电脑端连接的wifi。打开手机客户端,在输入框输入wifi密码
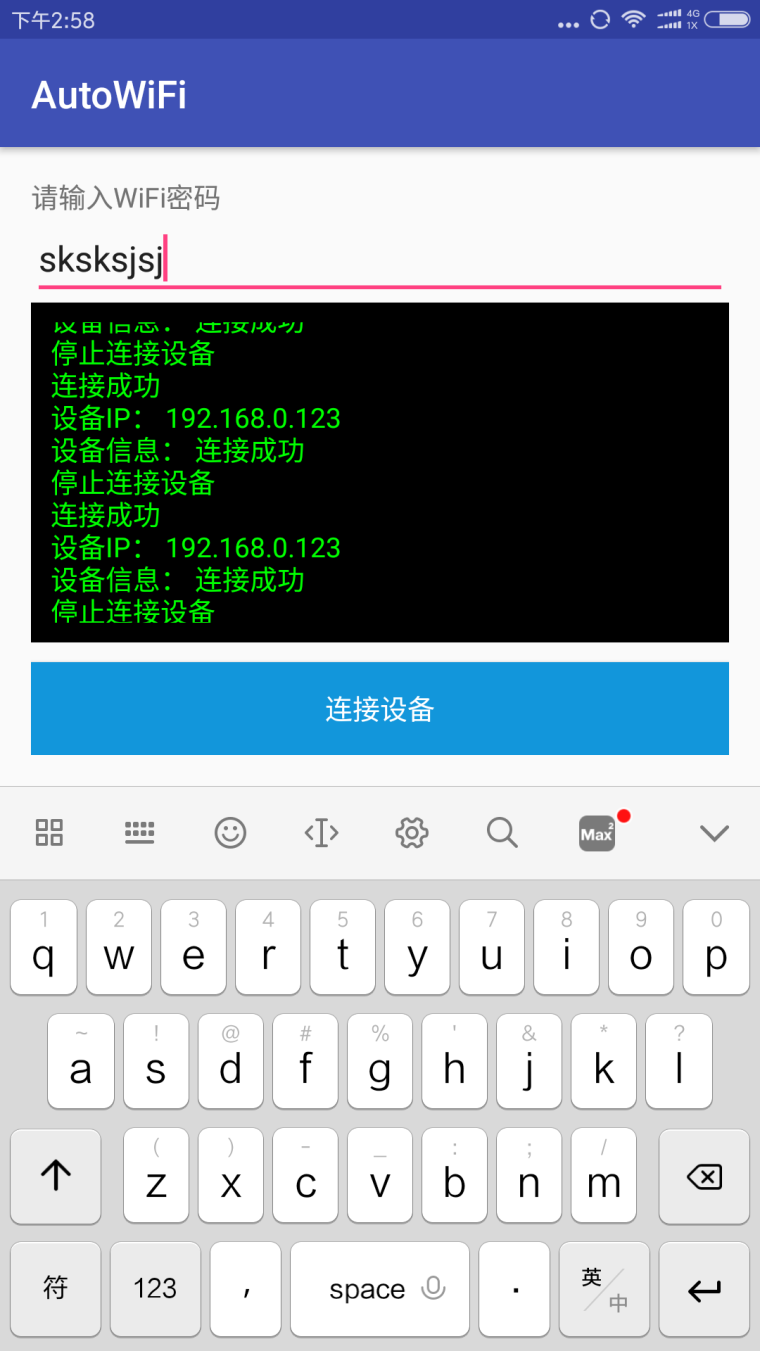
等待大概几十秒就能连接成功了。
注意:
连接的时候要保证电脑和手机的wifi信号比较强,否则可能连接失败