ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(20)___获取小车视觉里程计并在rviz中显示小车轨迹
-
这里的视觉里程计由orb_slam2负责发布,发布在/bWmono/Odom话题。
VNC登录机器人,在机器人上打开命令行
查看startup 开机任务是否运行
sudo service startup status如果显示runing,说明正常,如果显示stopped,则重新启动它
sudo service startup start 如果想关闭这个任务,可以使用这条指令 sudo service startup stop查看系统状态
bwcheck在另一个命令窗口启动ORB_SLAM2
roslaunch orb_slam2 map.launch回到上一个窗口,等待ORB_SLAM2启动完毕
在机器人命令行终端中输入
rvizrviz配置文件,这个配置文件也可直接从小强主机上的ORB_SLAM2包中拷贝,用于查看小强视觉系统输出的轨迹
当窗口打开后,点击左上角的file->open,选择上述配置文件。这时界面应该如下图显示
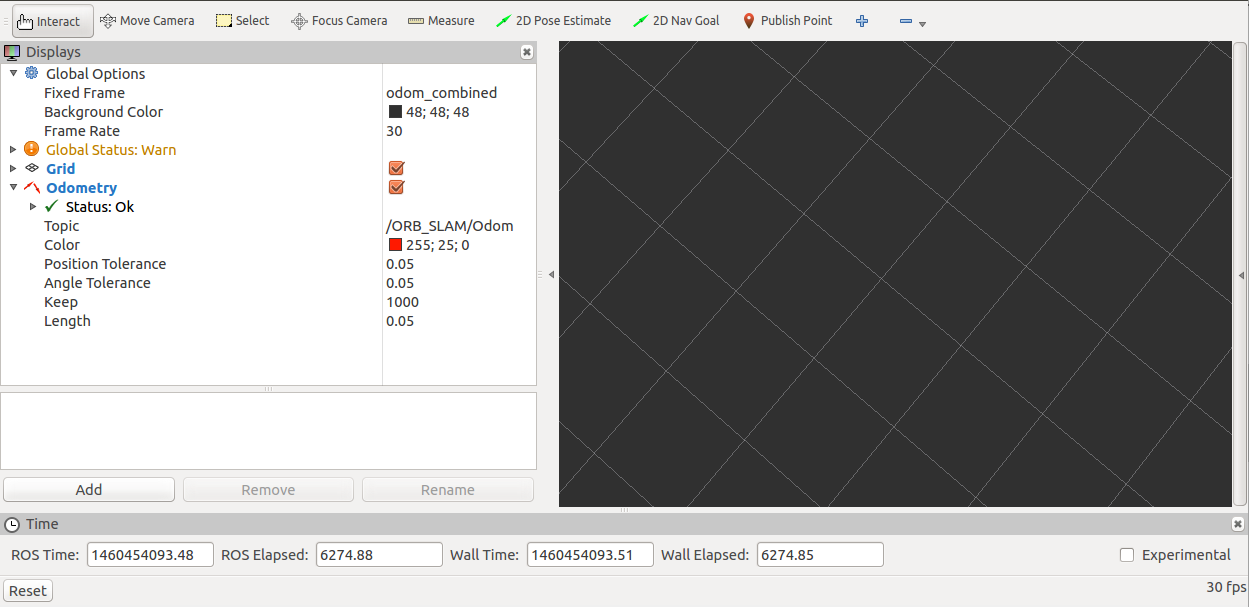
通过客户连接机器人,遥控小车前进一小段距离,使orb_slam2初始化完成
到此我们就已经获取小车的视觉里程计
随着小强的移动,本机上的rviz界面里就会实时更新显示出小车的轨迹,我们自己的测试视频在这
关于rviz的更多使用方法请移步这里