ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
无人驾驶公司“智行者”无人驾驶扫路机在北京某园区正式落地运营
-
蜗小白无人驾驶扫路机共享了此前积累的“蜗必达”AVOS系统测试数据,因此可以快速部署。
9月11日,北京智行者科技有联合百度Apollo 平台、烟台海德在北京某园区进行了无人驾驶扫路机-蜗小白的落地运营。其中无人驾驶扫路机-蜗小白隶属智行者低速无人驾驶“蜗Ω”系列,是无人驾驶作业车的一种。
由左至右依次:百度Apollo运营及生态负责人张辉、烟台海德北京总经理李雪、智行者CEO张德兆蜗小白由烟台海德专用汽车有限公司(提供扫路机平台)、百度Apollo平台(提供高精度地图和定位技术)、智行者(提供无人驾驶整体解决方案)合作推出。蜗小白可以实现园区内自动避障、自主循迹、定点起停、自主扫地等智能功能,并通过WEB端,展示了无人驾驶扫路机全局地图及行驶路径,操作人员在值班室可对无人驾驶扫路机进行安全监控。
在无人驾驶解决方案方面,蜗小白采用了百度Apollo平台提供的高精地图和定位技术。百度高精地图研发工作于2013年底启动,目的是攻克中国复杂道路环境,让无人驾驶车辆可以在中国道路上自由行驶。百度高精地图结合Simultaneous localization and mapping (SLAM)、深度学习、图像处理、计算几何等多种处理技术进行加工及制作,涵盖道路、车道线、交通标志、地面标志、红绿灯、护栏等丰富的道路信息,数据精度达到厘米级别。在这个园区类似的场景中,林荫道路非常普遍,传统的RTK定位技术由于GPS信号弱以及多径效应,无法满足稳定的高精度定位要求,而百度的定位技术可在城市高楼密集市中心、林荫路、隧道、地库等极具挑战的弱/无GPS场景下达到厘米级定位。
其中一个值得关注的地方是,蜗小白由智行者提供无人驾驶整体解决方案,并搭载智行者自主研发的无人驾驶操作系统AVOS,该系统搭载多传感器自适应融合算法、环境认知算法、路径规划算法以及车辆控制算法,采用算法层与业务层剥离的策略,底层是通用型的算法平台,能满足智能驾驶的各种应用需求。
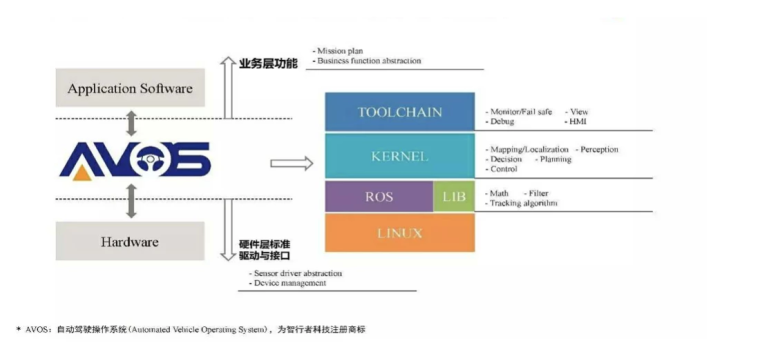
智行者自主研发的AVOS系统这不是智行者第一次涉足低速无人车领域,早在今年6月份智行者发布了蜗必达-无人配送物流车,蜗小白无人驾驶扫路机共享了此前积累的“蜗必达”AVOS系统测试数据,在短时间内智行者开发完成无人驾驶扫路机,这也是由于AVOS系统具有普适性,可移植性较强。
本文来源:http://36kr.com/p/5092575.html