ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(2)___蓝鲸智能开源软件仓库的使用和ROS开机启动任务的配置
-
小强的所有软件源码都共享在蓝鲸智能的开源仓库里,任何人任何组织都可以自由下载使用或进行二次开发,Github仓库 Gitee仓库
对于小强用户,开源仓库中的软件可以直接git clone到小强的ROS工作目录里,然后就可以直接用ROS的工具链
catkin_make编译使用。小强的ROS工作目录为:/home/xiaoqiang/Documents/ros/src下文将以开源仓库中的startup软件包为例,演示开源仓库的完整使用过程。
一、startup软件包功能介绍
小强主机开机后,会自动启动名字为startup的linux服务脚本,startup服务脚本运行时会去启动 startup 软件包中的startup.launch文件 在Ubuntu系统中注册的复制品。因此我们通过修改startup软件包中的startup.launch文件,然后将这个文件在ubuntu系统中注册为startup服务,就能控制小强主机的开机启动任务了。
二、修改软件包中launch文件夹内的startup.launch文件
利用上篇教程安装的vscode编辑器,在本地遥控端直接编辑这个文件(需要远程访问小强的主机文件目录,请参考上篇基础操作教程进行配置)
在上图箭头区域,添加或删除你需要启动的ROS launch文件及ROS node,这些项目在下文将被添加进小强主机的开机启动项里,小强下次开机会自动运行这些项目。最后保存退出
三、将startup.launch文件在小强主机中注册为startup 开机启动服务
接着二中的机器人命令行窗口输入
a.首先将之前注册的startup服务停止和删除
sudo service startup stop rosrun robot_upstart uninstall startupb.重新注册startup 开机启动服务
rosrun robot_upstart install startup/launch/startup.launch sudo systemctl daemon-reload && sudo systemctl start startup四、远程重启小强主机,查看开机启动项是否正常加载
接着上文的ssh窗口输入
下发重启命令
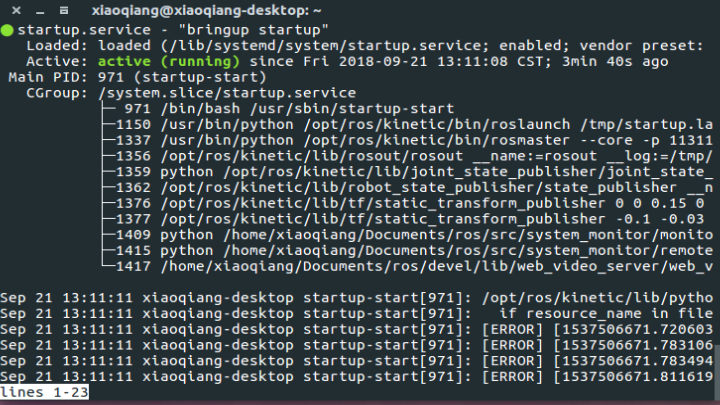
sudo reboot查看startup服务状态
sudo service startup status正常的话会显示startup start/running 如下图所示
d.还可以进一步查看相关的topic 是否已经发布出来rostopic list