ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
DSO_ROS 运行时报错 eigen
-
使用蓝鲸智能的包,
root@yang-ThinkPad-S5:~/dso_catkin_ws# rosrun dso_ros dso_live image:=/usb_cam/image_raw calib=/root/dso_catkin_ws/src/dso_ros/camera.txt
loading calibration from /root/dso_catkin_ws/src/dso_ros/camera.txt!
MODE WITH CALIBRATION, but without exposure times!
Reading Calibration from file /root/dso_catkin_ws/src/dso_ros/camera.txt … found!
found RadTan (OpenCV) camera model, building rectifier.
Creating RadTan undistorter
Input resolution: 640 480
In: 528.694706 527.047369 300.139713 251.006010 -0.438973 0.343223 0.000416 -0.000009
Out: Rectify Crop
Output resolution: 640 480
finding CROP optimal new model!
initial range: x: -0.6543 - 0.7507; y: -0.5321 - 0.4747!
iteration 00001: range: x: -0.6510 - 0.7470; y: -0.5321 - 0.4747!
iteration 00002: range: x: -0.6478 - 0.7432; y: -0.5321 - 0.4747!
iteration 00003: range: x: -0.6478 - 0.7395; y: -0.5321 - 0.4747!
iteration 00004: range: x: -0.6478 - 0.7358; y: -0.5321 - 0.4747!
iteration 00005: range: x: -0.6478 - 0.7358; y: -0.5294 - 0.4723!
iteration 00006: range: x: -0.6478 - 0.7358; y: -0.5268 - 0.4700!
iteration 00007: range: x: -0.6478 - 0.7358; y: -0.5268 - 0.4700!Rectified Kamera Matrix:
461.845 0 299.161
0 480.574 253.147
0 0 1NO PHOTOMETRIC Calibration!
Reading Photometric Calibration from file
PhotometricUndistorter: Could not open file!
using pyramid levels 0 to 3. coarsest resolution: 80 x 60!
START PANGOLIN!
dso_live: /usr/include/eigen3/Eigen/src/Core/DenseStorage.h:128: Eigen::internal::plain_array<T, Size, MatrixOrArrayOptions, 32>::plain_array() [with T = float; int Size = 8; int MatrixOrArrayOptions = 0]: Assertion `(reinterpret_cast<size_t>(eigen_unaligned_array_assert_workaround_gcc47(array)) & (31)) == 0 && “this assertion is explained here: " “http://eigen.tuxfamily.org/dox-devel/group__TopicUnalignedArrayAssert.html” " **** READ THIS WEB PAGE !!! ****”’ failed.
Aborted (core dumped) -
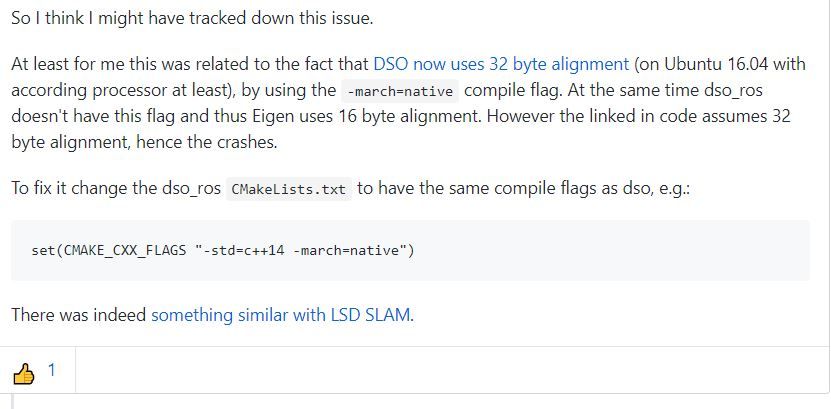
@CVYang 参考这里https://github.com/JakobEngel/dso_ros/issues/13
-