ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强用户可以免费使用伽利略单目视觉导航系统
-

2018年6月14日晚开始,蓝鲸智能机器人研发的单目视觉导航系统“伽利略视觉导航系统”对于小强用户免费开放。伽利略系统是蓝鲸智能机器人开发的一个视觉导航系统。视频展示 http://www.bwbot.org/static/video/nav2.mp4
现在所有小强用户都可以免费使用了。详细信息可以看这里 https://community.bwbot.org/topic/488。欢迎大家使用和提意见。
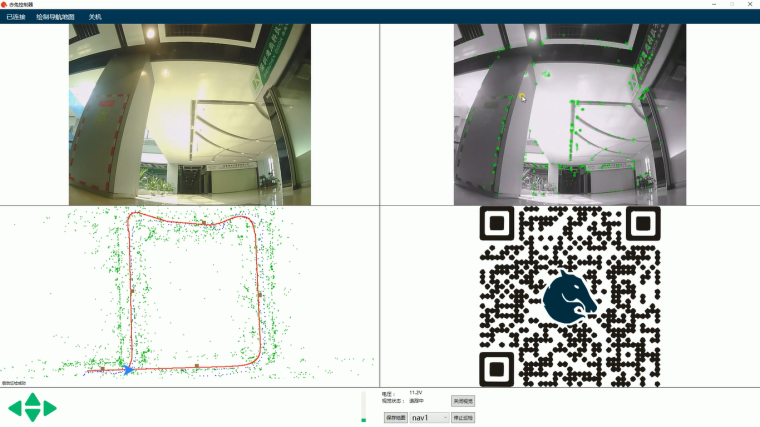
小强链接https://item.taobao.com/item.htm?id=527426530377伽利略视觉导航系统利用廉价的cmos rgb摄像头采集机器人视野内图像,通过连续多帧图像中的特征点信息来计算机器人当前姿态,同时建立三维视觉导航地图。地图建立之后,通过对比当前图像的特征点与地图中的特征点,伽利略视觉导航系统可以持续快速输出机器人在地图中的实时位置。机器人路径规划模块根据这个实时位置信息控制机器人完成预设动作,从而实现机器人的自主无轨运动。
伽利略视觉导航系统的主体功能是视觉导航地图的建立更新、机器人实时定位。对于机器人的运动控制,客户除了可以自行开发也可以使用我们附带提供的路径和运动规划ROS程序包。ROS(Robot Operating System)是业界最通用的开源机器人操作系统,它基于linux电脑操作系统,定义了各种机器人传感器数据传输协议和格式标准,它也提供一系列开源工具包。类似手机安卓系统的app,采用ROS开发的程序包可以方便地在不同机器人硬件平台转移部署。
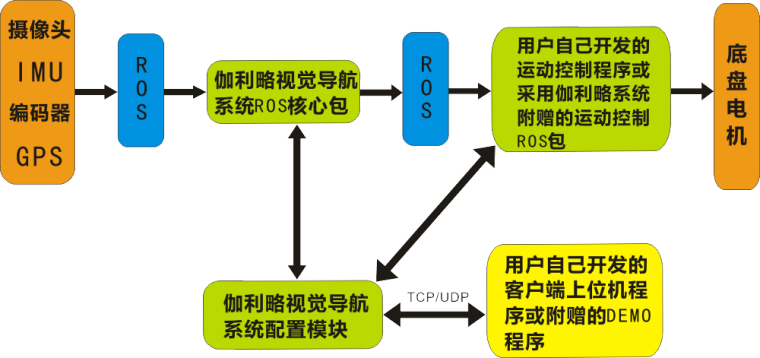
摄像头和其它机器人传感器接入ROS系统转换成ROS标准格式数据,这些数据经过伽利略视觉导航系统ROS核心包处理后得到机器人位置和地图,机器人位置和地图接着也传入ROS封装成ROS标准格式数据。机器人运动控制程序通过ROS可以获取机器人位置和地图数据,配合控制策略得到底盘电机控制量,从而完成机器人的自主移动任务。
客户端程序通过网络接口调用伽利略视觉导航系统的配置模块,可以获取机器人位置用于界面显示,也可以上传和下载地图、触发导航系统的开启与关闭,还可以配置导航系统的各项参数。
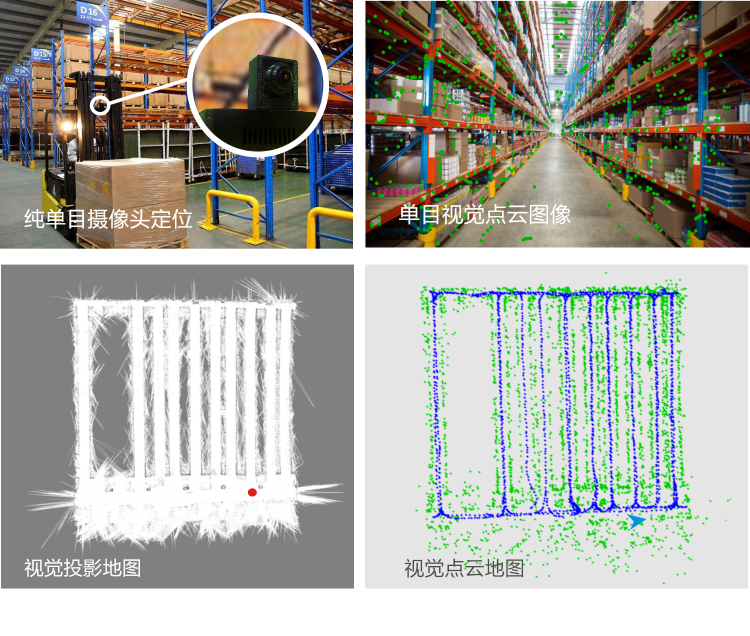
实际场景应用:
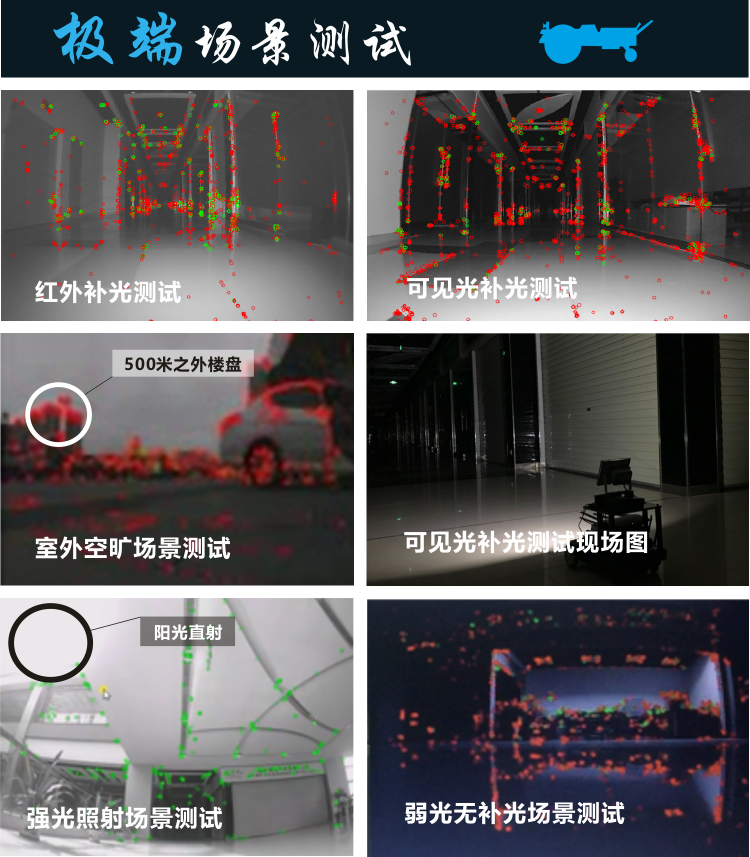
极端场景测试:
除了小强用户可以免费使用之外,伽利略系统也可以单独购买,可以直接登陆我们官网联系销售人员咨询。

-
