ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
基于TOF技术避障与物体3D模型构建
-
声明:本文转自http://www.csdn.net/article/a/2015-12-29/15833252
摘要:对于智能机器人,避障是一个不可或缺的功能,本文章提供一种基于TOF技术的红外避障方案,单芯片同时能够精准测距、3D图形构建、手势识别。距离远、精度高、延迟少。一、前言
对于智能机器人,避障是一个不可或缺的功能,本文章提供一种基于TOF技术的红外避障方案,单芯片同时能够精准测距、3D图形构建、手势识别。距离远、精度高、延迟少。
二、概述
TOF,即Time ON Fly,利用红外光在空气中的飞行时间,算出距离物体距离。
TOF测距距离远,精度高,相比超声波测距优势很大,同时多点感应的TOF芯片,比如88=64点感应的,更精确的有240320的,可以实现构建物体3D模型,应用非常广,比如扫描房间轮廓,构建地图、识别手势,可以在Dragon Board 410c DSP上定义各种手势代表意义,比目前常用手势识别IC智能识别上下左右前后等更灵活。
本文我们尝试基于Dragon Board 410c 去搭建一个TOF 8*8阵列的IC,型号为EPC610。
三、详细说明
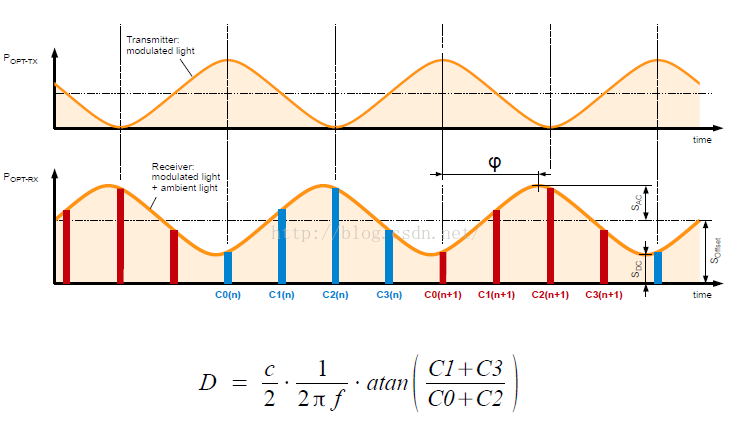
3.1 TOF测距原理
利用红外光在空气中的飞行时间,算出距离物体距离
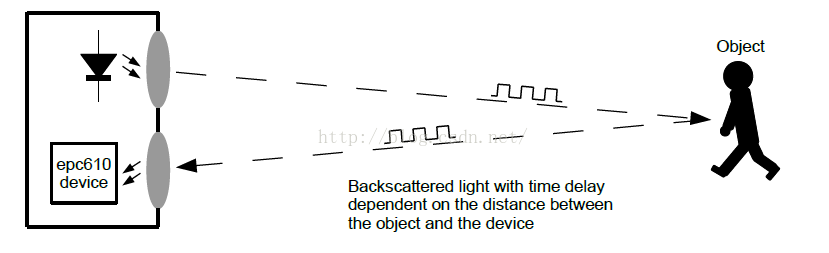
光的飞行时间:
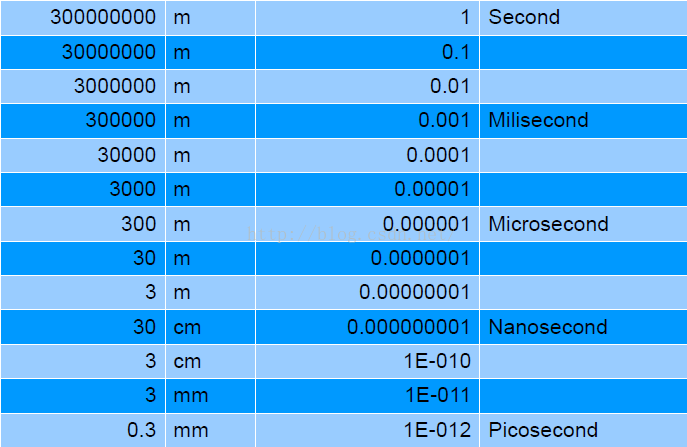
TOF距离测量
3.2 TOF系统测距的优势
3.2.1TOF优势
完整的图像采集
高帧频
距离的测量范围从几厘米到数十米
体积小,集成度高,周边器件少,高经济效益。
无移动部件
根据不同环境光自动调节
3.2.2TOF 8*8EPC610特点
片上全集成的距离测量或者物体检测数据采集系统,减少周边器件,使设计最简化。
片上集成高功率LED驱动
易于同微处理器组成相应的应用
绝对距离测量并以数据形式输出
片上集成数据信号处理
具有高灵敏度,并且测量距离最远可达15米(10MHZ)
响应时间可小于1ms
数字数据接口输出,包含12bit的距离数据以及4bit的信号质量等参数
优良的环境光抑制能力,最高可 >100kLux.
内部集成环境光检测能力 (“Luxmeter”)
例如:亮度控制或调光功能
+8.5V以及-3.0V电源供电以及非常低的电源功耗
数字数据接口 (2-wire / SPI)
SMD全兼容的超小CSP24芯片封装
3.3 基于Dragon Board 410cTOF测距应用设计
3.3.1通讯接口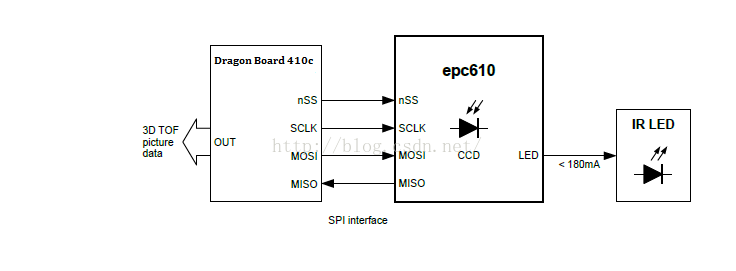
选用410C的SPI接口,但EPC610是5V的IO电平,需增加Level shift。
3.3.2设计注意事项
为获取更高的测量距离与误差,需注意以下:
如上图,增加聚光的镜头,同时为不让发射光直接被Sensor感知,镜头底座不漏光。
-5V的偏压峰值纹波要求比较高,-5V是由+5V经过chargepump反转的来的电压,注意不要跟其他模块共用。
3.3 总结
超声波测距对反射物体要求比较高,面积小的物体,如线、锥形物体就基本测不到,而TOF红外测距完全可克服此问题,同时TOF测距精度高,测距远,响应快。考虑到红外避障会受环境的影响,比如强太阳光下、大雾环境下、被测物体是透明玻璃,红外光直接透过等,因此我们推荐超声波与红外可搭配应用,互补各自缺点。