ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用xiaoqiang_track进行人体跟随和追踪
-
@weijiz 请问这个错误是什么情况,不管多人还是单人模式下,都无法运行,之前的下载无错误。求指教,谢谢!OutOfRangeError (see above for traceback): Read less bytes than requested
[[Node: save/RestoreV2_525 = RestoreV2[dtypes=[DT_FLOAT], _device=“/job:localhost/replica:0/task:0/device:CPU:0”](_arg_save/Const_0_0, save/RestoreV2_525/tensor_names, save/RestoreV2_525/shape_and_slices)]] -
@CODLONY 可能是模型没有下载完全
-
你好 请问在做语音这块的时候 找不到这个包 ResourceNotFound: audio_capture
-
@huapiaoxiang21 缺少依赖的软件包 可以参照这里的说明进行安装。
-
@weijiz 这块东西我重新安装了一遍 还是缺少audio_capture
-
@huapiaoxiang21 sudo apt-get install ros-kinetic-audio-*
这样试试 -
你好 还是这个错误 ERROR: cannot launch node of type [audio_capture/audio_capture]: can’t locate node [audio_capture] in package [audio_capture]
-
你好,请问输入给MOSSE算法的图像,是人体识别算法运行后,根据关键点位置给出的红框吗?
-
@xxyh 对 是这样的
-
请问想要在ros melodic上使用本程序,需要做哪些修改呢
-
@weijiz

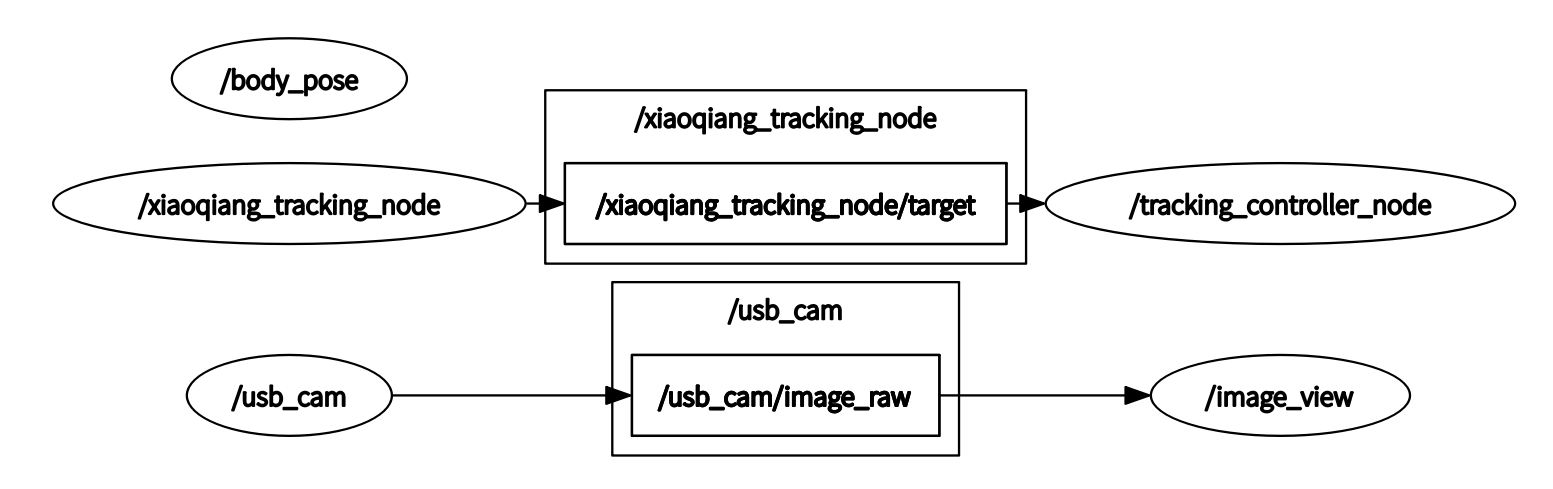
请问一下,这个是什么请况,看节点图image_view并没有传入Tracking,这个是需要在代码上改动吗?
-
@Baymax 你的图像话题是
usb_cam/image_raw他订阅的话题是camera_node/image_raw你要在launch文件里面remap一下 -
你好 运行xiaoqiang_track时报错
ERROR: cannot launch node of type [xiaoqiang_track/tracking_node]: Cannot locate node of type [tracking_node] in package [xiaoqiang_track]. Make sure file exists in package path and permission is set to executable (chmod +x)
这是什么原因呢? -
@yellow 没有编译成功吧,可执行文件没生成
-
不用语音的话 是检测到人就自动跟踪吗
-
@yellow 对,语音只是信息提示的作用
-
你好 请问一下为什么我用机器人进行跟踪 机器人不会左转 只会右转 请问怎么解决?
-
@yellow 先确认是不是底盘问题,能不能正常遥控。然后看一下处理后的图像输出,追踪框位置是不是目标位置
-
博主,你好,在body_pose中的Tensorflow的链接已经失效,麻烦可以提供新的链接地址吗
-
@huapiaoxiang21 https://github.com/lakshayg/tensorflow-build/ 可以在这个软件源里面找