ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强开发平台产品常见问题(实时更新)
-
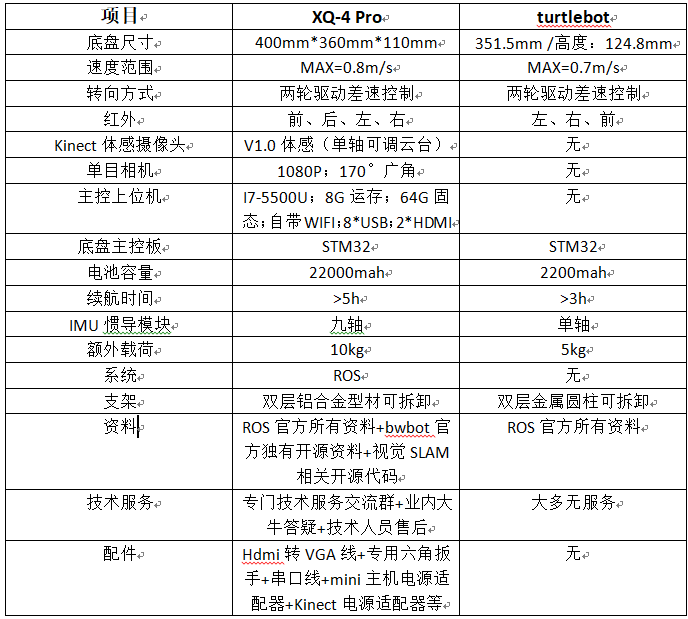
Q:小强XQ-4 Pro机器人和turtlebot有什么区别?
A:请看下表:
Q:小强机器人都可以加哪些额外的配置套餐?
A:
1、小强可以加任何支持USB的传感器(USB相机;USB温度探头;USB指纹采集模块;USB相位法红外测距模块;USB颜色传感器;USB湿度传感器;USB烟雾传感器等等);
2、可以加各种激光雷达,可以USB供电,也可以9V,12V供电,小强提供12V外接电源,还可以根据需求升降电压(自己安装电源模块)。
3、体感摄像头也可以,包括kinect、奥比中光、图漾、realsense和易福门的TOF都是经过测试可以使用的,其他体感传感器只要有相关ROS驱动即可。经过测试kinect的SLAM效果最佳,kinect v1比kinect V2效果更好。Q:为什么kinectV1 反而比 Kinect V2 效果更好呢?
A:首先为大家介绍一下kinect
Kinect是微软在2010年6月14日对XBOX360体感周边外设正式发布的名字。也就是说kinect本身是Xbox的外围设备,用途是作为传感器来进行体感游戏的,那么为很么kinect和slam技术联系在了一起呢?因为kinect可以获取景物的立体点云信息(3D模型),这样就可以进行避障和导航,所以用到了SLAM技术中,并且kinect V2的发布是为了增强体感游戏的性能体验,并不是为了SLAM技术相关的需求,而且kinectV2 去掉了V1 的单轴可控俯仰角云台,反而失去了对于SLAM来说很有用的功能,并且价格V2比V1要贵好多,所以建议使用V1.Q:小强可以加超声波么?为什么推荐配置套餐中没有超声波选项?
A:
首先声明超声波的开发并不是件难事,但现有市场上的超声波鱼龙混杂,很多低价格的普通产生波经过实测后发现根本不能有很稳定的效果,而且测距的精度也是不尽人意,但是小强实际上是支持超声波的,我们目前官方测试超声波版本为汽车使用级别的倒车雷达传超声波传感器,为了客户能够体验到最优秀的性能,我们官方没有推荐一些低价位的超声波模块,购买小强的客户很多是为了学习使用,超声波的使用没有太多的可研究价值,一些进行工程应用开发的客户也不会在乎这点价位差别而牺牲实用性能。综上,这个问题的答案是小强机器人支持超声波,具体价格可以咨询淘宝客服或者拨打官网上的销售人员电话询问,超声波目前有专用的支持ROS的扩展板,一块扩展板可以支持4路超声波,您可以按照自己的需要进行配置,和销售人员进行沟通即可。Q:小强机器人是否可以更换主控电脑?
A:小强的主机和底层控制单元为串口通讯,一根USB串口线连接。如果自己的板卡或者电脑支持USB的话就可以更换,但是需要自己配置相关驱动和通讯协议。另外小强机器人不单独售卖底盘,即使自己更换电脑仍然需要购买小强机器人官方套餐,为了客户稳定的开发,我们决定保留电脑,而且提供远程登陆主机桌面的开发方式的教程,这样的话就能在不用外接显示器的情况下进行开发,比安装自己的笔记本更为方便,小强配置的电脑均为SSD固态硬盘,顶配更是i7-5500U CPU+8G运存,可以说性能已经非常高了,基本没有必要更换自己的电脑。Q:可以开发票么?开成多张?开成小车的零部件?
A:我们为机器人的唯一厂家,可开增值税专票和普票,税点目前统一为4个点,含税价格为总价格*1.04来计算,由于公司主营业务范围允许,我司可以开具相关零部件明细发票,具体要求请与公司销售人员联系,在公司官网下面可以找到,网址:www.bwbot.org.Q:机器人可以定制么?
A:目前机器人的状态为两轮驱动两轮从动的四轮结构,少数客户也许需要更换底盘驱动方式、更换电机类型、更换主控甚至定制外观,这些服务我们均可提供,但是会根据相关材料费用和工时费用进行报价,需要联系公司销售人员进行询价。销售人员联系方式可以到我司官网最下面找到,网址:www.bwbot.org。Q:视觉导航相比激光雷达有什么优势?
A:视觉导航分为单目视觉和双目视觉,单目视觉的硬件要求低,算法难度大,双目可以通过双目效应实现景物的3维建模,但是双目算法的精度较低,无法达到小规模自主导航要求,所以除了避障的因素之外,光是导航的话单目视觉具有成本低,精度高等优势,我们主要使用单目视觉方案进行导航定位,那么激光雷达的话如果较大范围的场地,比如说15M以上的场地激光雷达普通的几乎无法使用,需要上万的激光雷达传感器才可以满足,如果要是百米范围的扫描,激光雷达更是需要十万价位的才可以满足,激光雷达和视觉同样会受室外光线影响,视觉对光线的敏感度较高,我们现在推出了普适性的解决方案,包括室外曝光度自动调节算法,光纤方向遮挡,夜晚红外补光等等,可以适应各种场地和实况,视觉导航不但可以识别近在眼前的各种物体的特征,更是可以分辨出百米之外的景物特征点,而且只是用分辨率1080P的摄像头,成本极低,视觉导航更是可以和人脸识别,视觉跟随,智能识别,辅助驾驶,AI等领域直接结合,是机器人将来的主流技术,不但具有很高的科研价值,还具有广泛的市场价值。Q:买小强机器人有没有技术支持呢?
A: 我们公司有专门的技术支持人员,在我们的技术交流群中,更是有很多业内大牛进行实时答疑,此外,我们的论坛(community.bwbot.org)有电子版的教程几十篇,涵盖视觉导航、激光雷达slam、kinect、机械臂控制、手柄控制、App、IMU惯性导航等等相关独有资料,在ROS上的所有开源资料小强全部支持,此外,我们还有开源代码库(https://github.com/BlueWhaleRobot),教程里面提到的所有项目的开源代码都在上面供您参考,这些技术服务其他平台很慢满足,可以说我们的技术服务已经是很完善的了。Q:小强发货是散件还是整机?
A: 小强机器人发货是整机发货,但是为了邮寄安全因素考虑,小车的二层平台是有八个螺丝需要到货后安装避免运碎,发货前各个传感器和各项功能都会被我们的技术人员测试一遍之后才会出货,小强的寄送均为顺丰寄送,运费无需客户承担。Q: 小强关于激光雷达和视觉导航功能是开源的么?
A: 在教程中展示的功能的源代码都可以在我们的github网站上查找到,但是伽利略视觉导航系统的所有代码都是不开源的,小强平台是提供给开发学习者使用的,代码也是仅供学习参考,不得应用在商业领域进行牟利。只要是没有在我们官方网站、论坛和github上面公开的代码均为不开源代码,并且蓝鲸智能机器人拥有自主知识产权。Q: 小强机器人的资料在哪里可以找到?
A: 小强机器人有详细的教程,在我们网站上可以直接阅读或者下载,网址是:https://www.bwbot.org/zh-cn/ 进到网站后然后选择资料中心—>小强ROS机器人用户手册。也可以在论坛里面找到,先打开论坛地址:https://community.bwbot.org/—>产品服务—>小强机器人用户手册和教程目录。小强的每一篇教程都是有开源代码参考的,开源代码在我们的github里面,地址是:https://github.com/bluewhalerobot欢迎继续咨询,我们还将整理出更多的常见问题进行归类解答,方便大家。