ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
TX2刷机和使用常见问题
-
1. TX2介绍
Jetson TX2【1】是基于 NVIDIA Pascal
 架构的 AI 单模块超级计算机,性能强大(1 TFLOPS),外形小巧,节能高效(7.5W),非常适合机器人、无人机、智能摄像机和便携医疗设备等智能终端设备。
架构的 AI 单模块超级计算机,性能强大(1 TFLOPS),外形小巧,节能高效(7.5W),非常适合机器人、无人机、智能摄像机和便携医疗设备等智能终端设备。
Jatson TX2 与 TX1 相比,内存和 eMMC 提高了一倍,CUDA 架构升级为 Pascal,每瓦性能提高一倍,支持 Jetson TX1 模块的所有功能,支持更大、更深、更复杂的深度神经网络。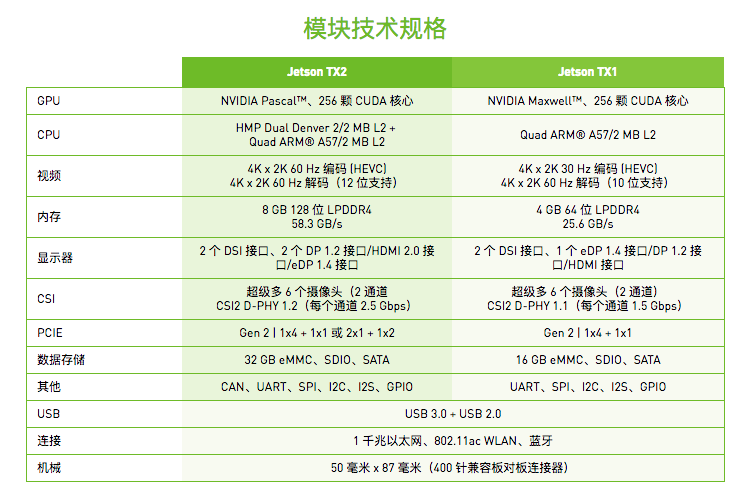
2. TX2刷机
系统要求
要给TX2刷机,需要一台装有Ubuntu 16.04系统的主机1. 下载安装jetpack软件包
官方下载地址 注意下载时需要注册成为Nvidia开发者
安装jetpack
chmod +x ./JetPack-L4T-3.1-linux-x64.run ./JetPack-L4T-3.1-linux-x64.run

如果出现下图则需要通过设置环境变量,让程序使用单线程下载,然后再此启动程序
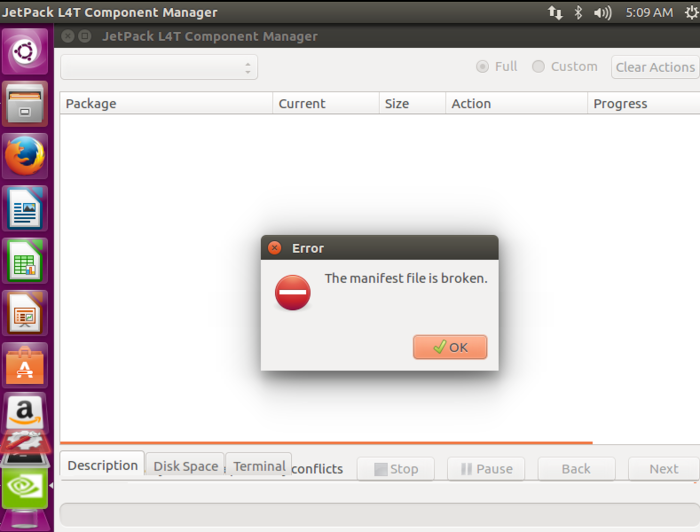
通过此指令设置环境变量
NV_DEVTOOLS_FORBID_MULTIPLE_DOWNLOAD_THREADS=1然后选择next
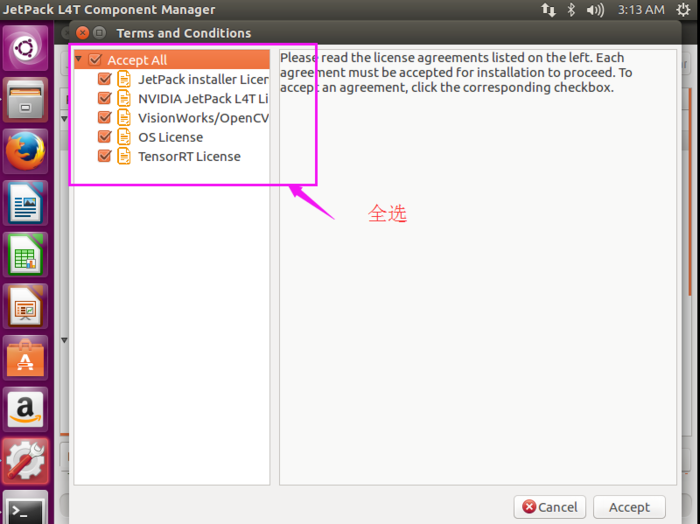
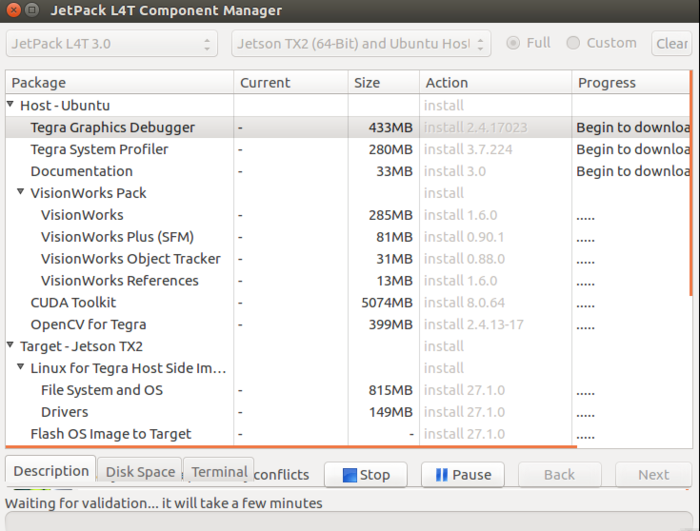
等待下载安装完成
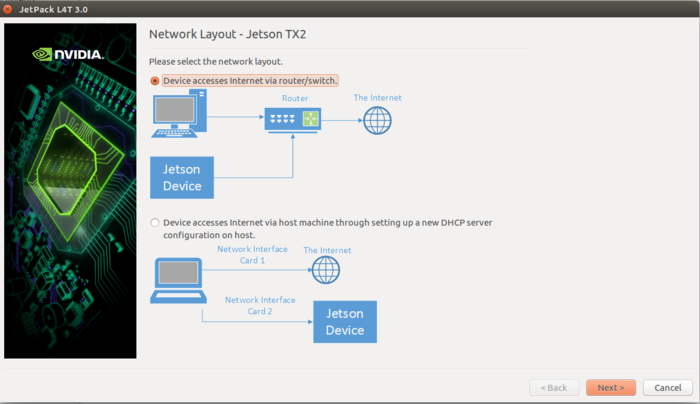
在出现此界面后保证给TX2连上网线,并且和自己的电脑在同一局域网内。
然后点击next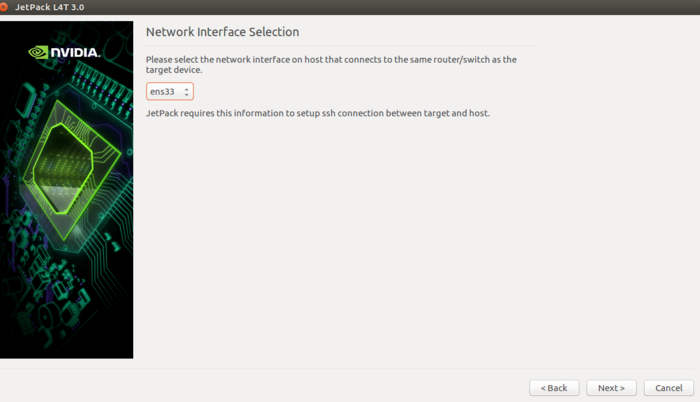
在此界面中选择正确的网卡(当前机器正在使用的有线网络)
一路Next 直到出现下图
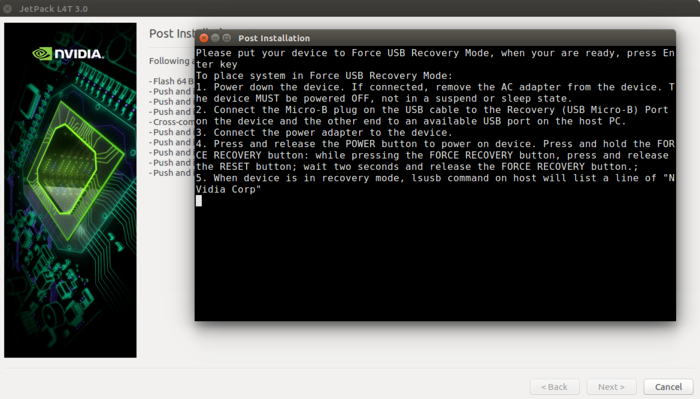
此窗口提示需要让TX2进入recovery模式
把通过USB线连接TX2和主机。然后给TX2重新插上电源。按下电源键(标有Power的按钮)后放开,之后按下Recovery按钮(标有REC的按钮)不放,同时按下复位键(标有RESET的按钮),可以看到指示灯闪了一下。说明已经进入recovery模式了。在主机上执行lsusb应该能够看到下面的输出
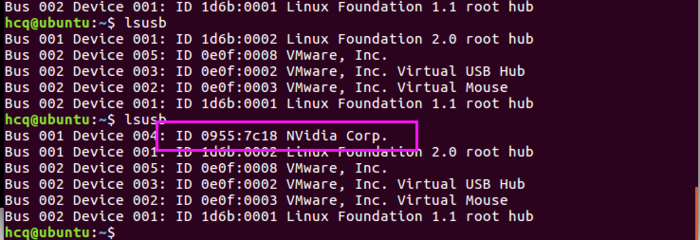
此时在刚才弹出的窗口中按回车键,刷机程序就开始执行了。
等待安装完成
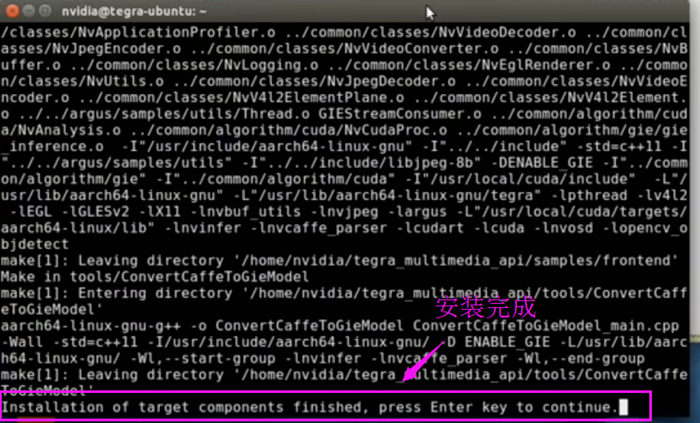
出现此窗口则说明已经安装完成
此时关闭窗口,然后重新开启TX2,就可以开始使用了。
3. TX2的使用
1. TX2的显示
TX2主板上提供了hdmi接口。如果有hdmi接口的显示器可以直接使用。如果没有hdmi接口的显示器可以使用vga转hdmi的转接头。但是转接头不一定好用,这涉及到显示驱动的问题。如果尝试了转接头仍然不好用,可以尝试使用vnc的方法。
在Ubuntu中使用VNC可以参照这一篇文章在路由器界面中可以看到TX2的ip,通过ssh进入tx2
然后按照上文的方法安装vnc安装完成后
就可以使用了。这种方法也非常适合在移动平台上使用TX2时的远程调试
2. TX2的分区
TX2本身的硬盘空间只有32G,对于一些复杂应用可能是不够的。用户可以自己外接硬盘,硬盘接口和普通的笔记本接口一样。然后可以通过修改TX2的fstab来挂载自己的硬盘。
但是实际使用时发现,不能替换掉原系统的/usr分区。会出现各种各样的问题,比如wifi无法使用,软件源报错等等。建议挂在到/home上。
3. TX2的备份
执行下面的指令进行备份
sudo ./flash.sh -r -k APP -G backup.img jetson-tx2 mmcblk0p1注意备份时间会比较长,生成的文件也很大,有三十多G。其中backup.img 为备份文件的名字。
还原时先把备份文件复制到bootloader文件夹里面,替换掉原本的文件。
sudo cp backup.img.raw bootloader/system.img然后执行刷机指令
sudo ./flash.sh -r -k APP jetson-tx2 mmcblk0p14. TX2的模式
TX2默认处于低功耗模式可以执行下面的指令开启最大性能
sudo nvpmodel -m0 sudo ./jetson_clocks.sh4. TX2的坑
1. TX2会破环自己电脑的系统的软件源
在自己的电脑上安装jetpack之后,软件源会被程序修改,导致apt-get update 失败。这是由于jetpack给原系统添加了arm的软件源,而其中有些源会下载失败。解决方法时删去arm的软件源
sudo dpkg --remove-architecture arm642. 安装ROS
安装ROS和官方安装方法是完全一样的
5. TX2的相关资源
https://www.elinux.org/Jetson_TX2
提供了TX2相关的各种信息。