ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang tutorial (3) Displaying Xiaoqiang Robot Model in rviz
-
Displaying Xiaoqiang Robot Model in rviz
It is a cool thing to display the current pose of the robot in real time. With rviz, you can easily achieve this goal in ROS. Look at the results:
The Xiaoqiang model package located at
Documents/ros/src/xiaoqiang_udrfand can also be downloaded from our open source repository on Github.# Connect the Xiaoqiang host to the monitor and keyboard, and after booting, open the terminal # stop the startup task first sudo service startup stop roscore # Open a new terminal on Xiaoqiang host, start this package roslaunch xiaoqiang_udrf display.launchNote that this process requires a graphical interface, so there is no way to operate through a remote ssh connection. If you must use ssh connection, you can add
-X(note the capital) option when connecting, but the experience is not good and is not recommended. It is recommended to operate through VNC. VNC installation method can refer to this article.If you want to open the model package remotely, you need to install Xiaoqiang's model package locally. For users using the Xiaoqiang system image, Xiaoqiang's model package has been installed in advance.
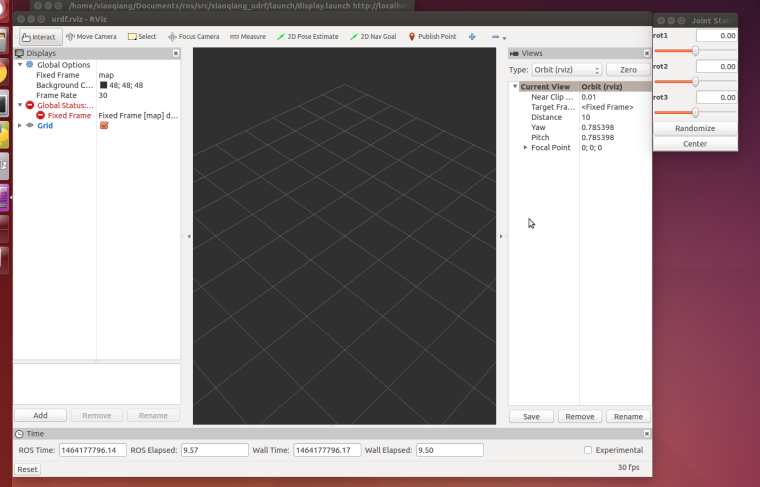
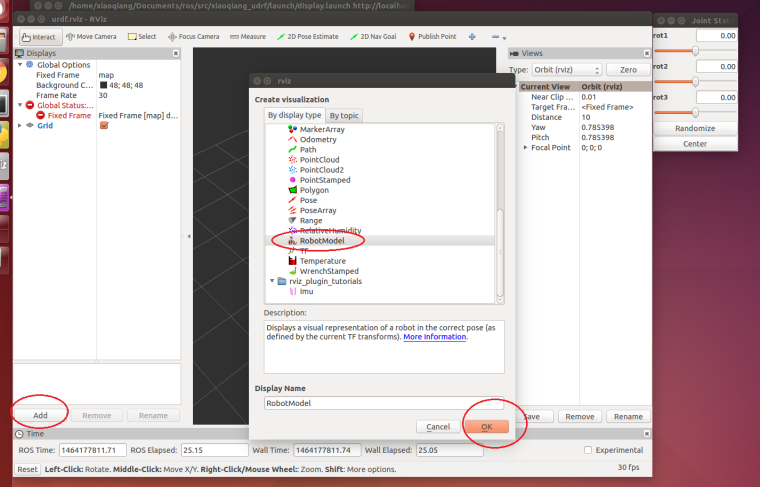
At this point, there is no thing to display, you need to add rviz display items
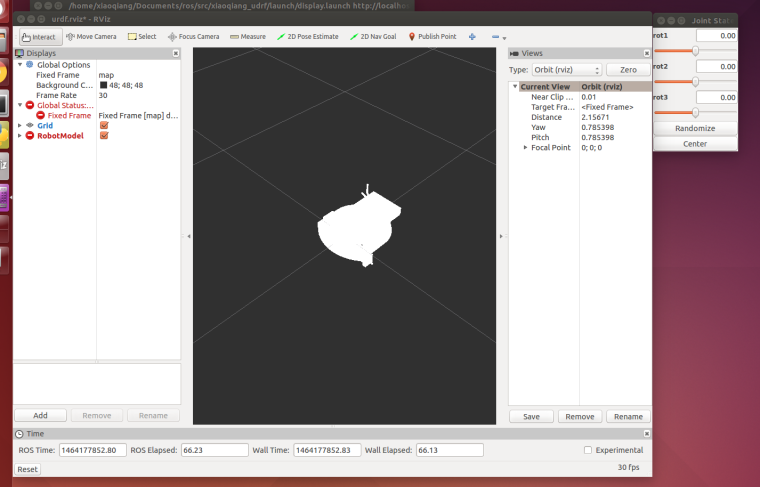
There is still a problem, the entire model is transparent and whitish, this is because the global coordinate system
fixed framein the rviz is not set properly, After map is changed tobase_link, it will display normally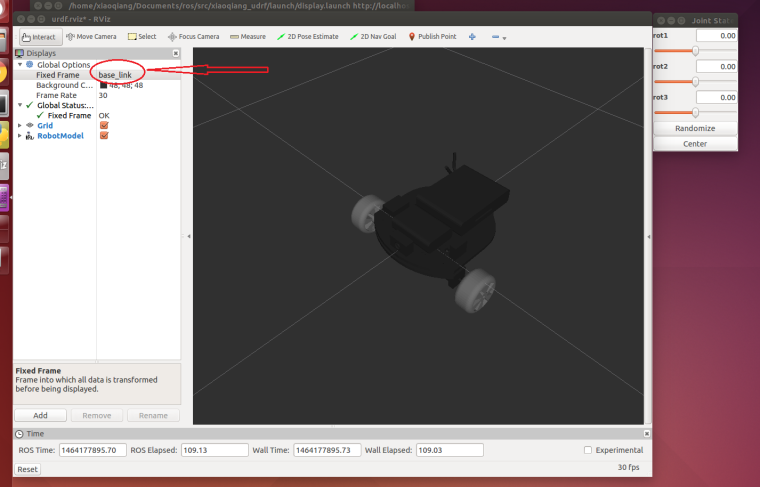
Now operate the slider in the upper right corner to turn the corresponding wheel.
Above we simply demonstrated the use of rviz to display the urdf model. The following section will describe in detail the whole process of making urdf model with solidworks under windows system.
First use solidworks to create the platform model, download and install the solidwork to urdf plug-in.
After making a model, you need to add a coordinate system. This coordinate system will be used as the reference coordinate system of the entire urdf model (ie, the base_link frame in ROS).
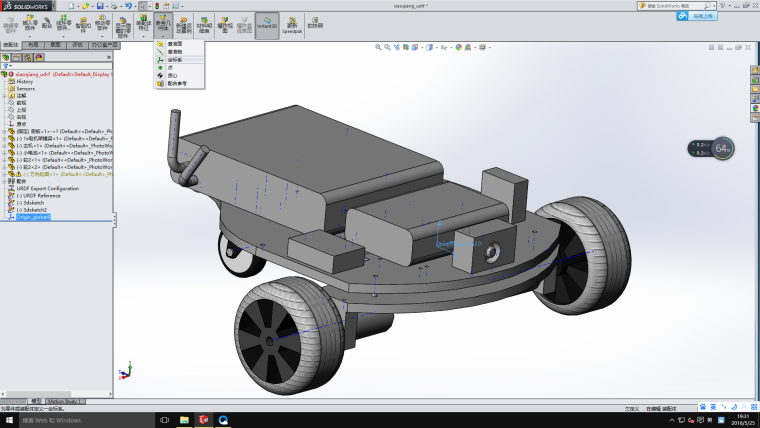
Open urdf plugin

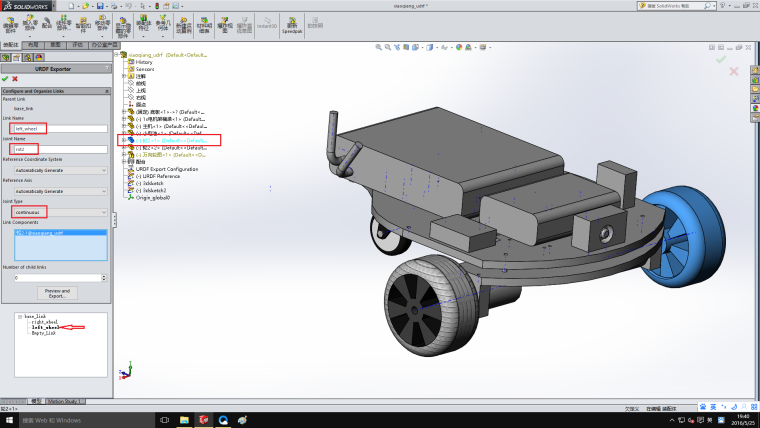
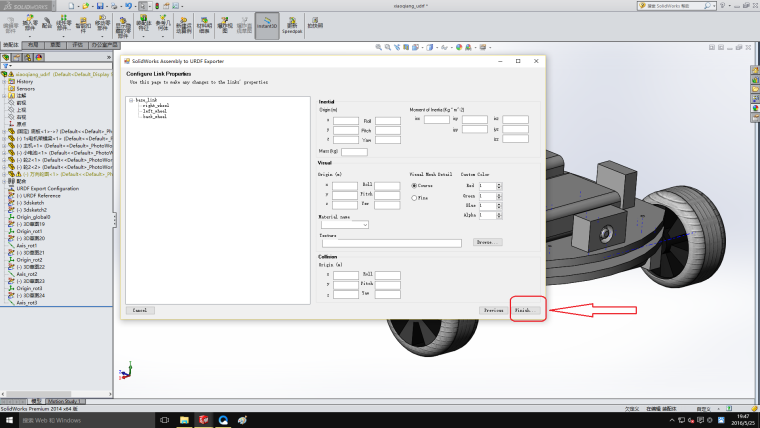
Xiaoqiang has two driving wheels and one driven wheel, so the whole model needs 3 links, 3 joints. First edit the
base_link, pay attention to the global coordinate system above, the red area in the picture is the item you need to click or modify.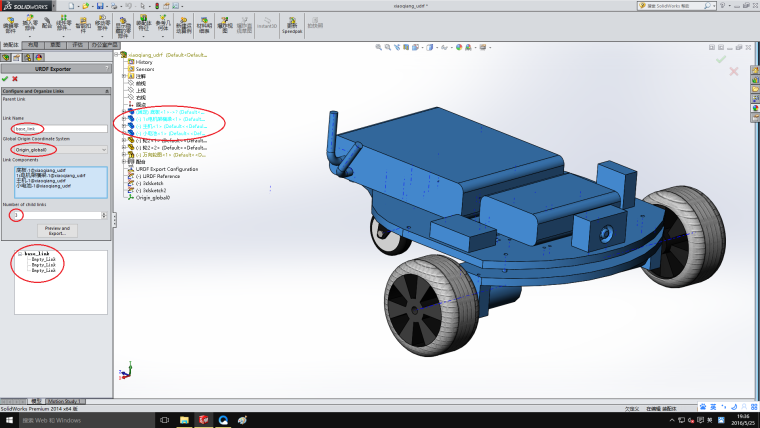
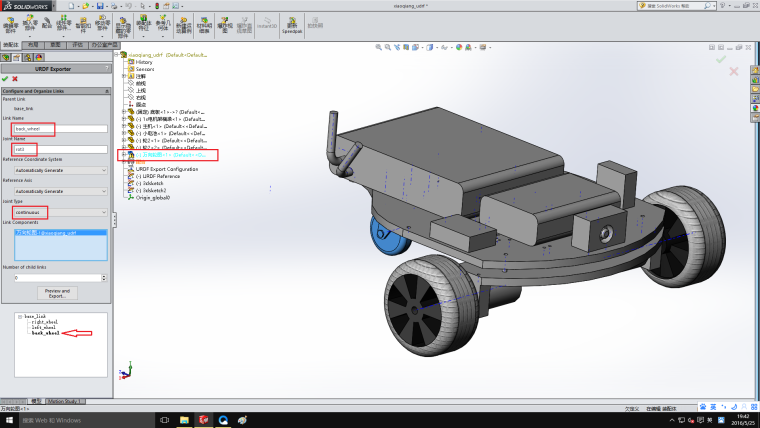
Then right wheel
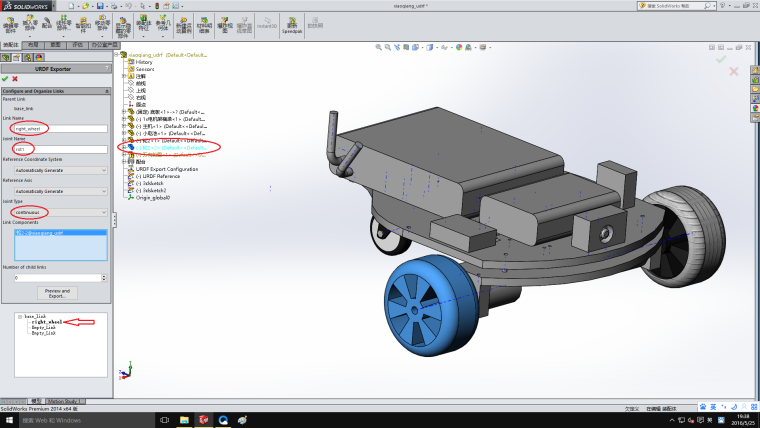
Continue the revolver and rear wheel
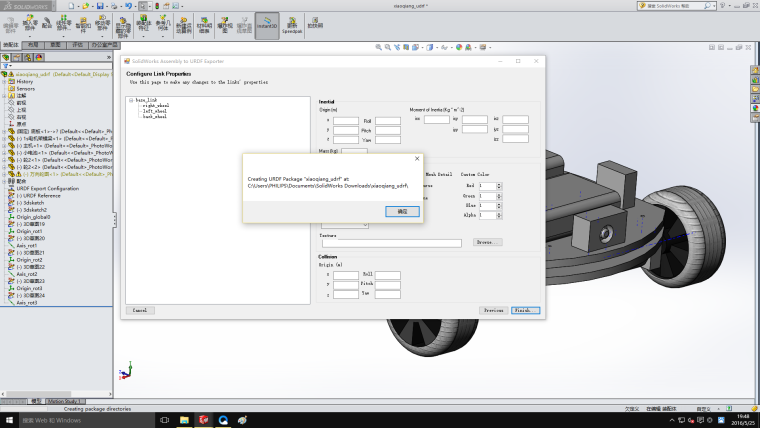
All settings are now complete, start exporting
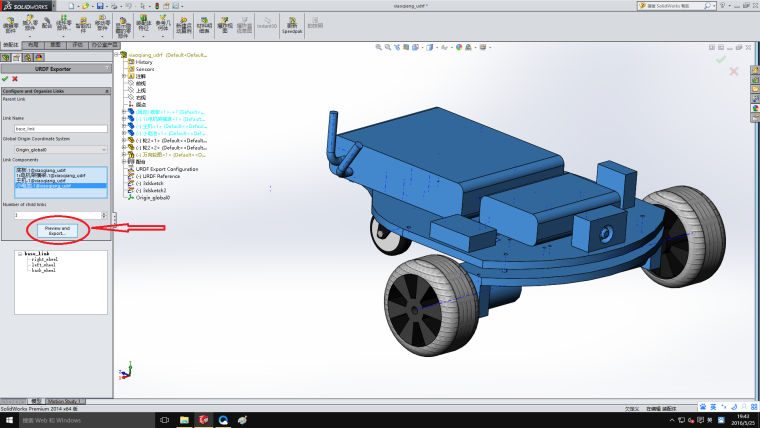
All the way next and ok go
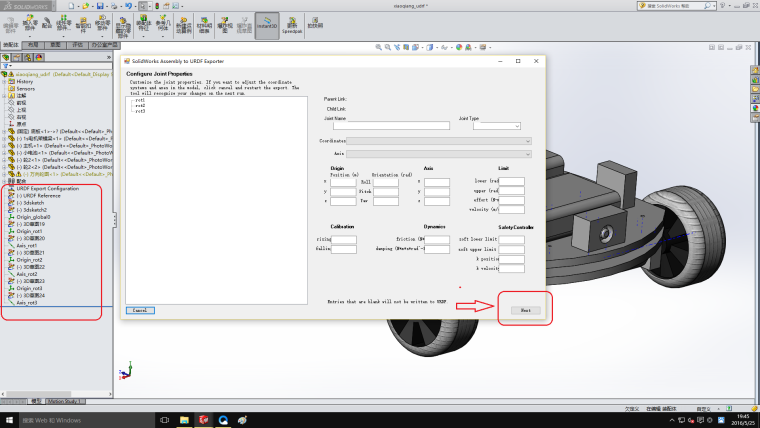
Now that we have obtained the robot’s urdf file, the entire generated folder is a ROS package. Modify the display.launch file in the launch folder and change false to true
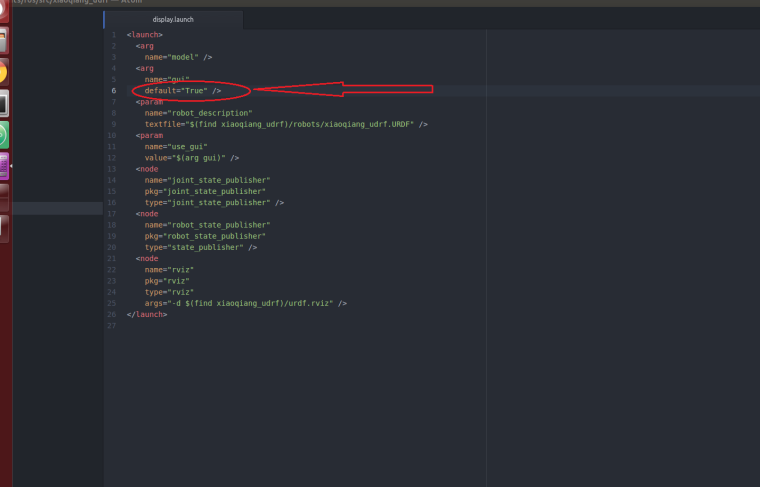
Copy this ros package to the ROS workspace. After running catkin_make, it can be tested and used by the method at the beginning of this article.