ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang tutorial (9) use rostopic to control kinect tilt angle
-
use rostopic control kinect tilt angle
Prepared work:
Please check the kinect version, indicated on the kinect base label. For the users of the model1473, due to the defect of the drive (which does not affect other functions of the kinect, only the motor), the following operations need to be performed first, and the model1414 user can directly skip.
ssh login xiaoqiang host
ssh xiaoqiang@192.168.0.xxx -X freenect-micviewIf the following figure appears, close the above command and continue the tutorial

Steps:
1. Open a new window in the local virtual machine, start the freenect_stack driver
ssh login Xiaoqiang host
ssh xiaoqiang@192.168.0.xxx -X roslaunch freenect_launch freenect-xyz.launchThe normal startup will appear below, if there is a red error (driver defect), please update the
freenect_stackprogram through git pull.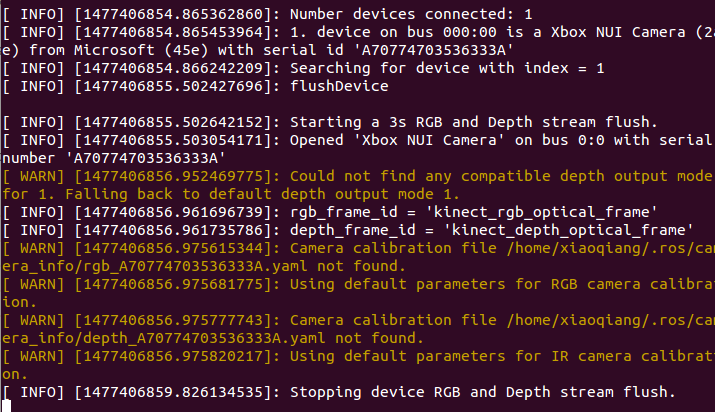
2.Open a new window in the local virtual machine, release the motor angle control command
ssh login Xiaoqiang host
ssh xiaoqiang@192.168.0.xxx -X rostopic pub /set_tilt_degree std_msgs/Int16 '{data: -20}' -1If all goes well, you can now see that the elevation of the kinect keeps getting smaller. The
{data: -20}number in the above command represents the angle and can be set to an integer between 30 and -30. Insert the kinect cable into the host’s blue Color usb3.0 port so that kinect can work properly.