ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang ROS robot tutorial (12) display point cloud for kinect2
-
1.Start kienct v2 ROS driver
The Xiaoqiang platform outputs a 12V power supply (DC head with “kinect power supply” tag) for kinect power supply, and the kinect v2 needs to be inserted into the blue host USB 3.0 interface of the Xiaoqiang. Connect the Xiaoqiang host to the monitor and keyboard. Open a terminal on the Xiaoqiang host and enter the following command
roslaunch kinect2_bridge kinect2-xyz.launch2.Open a new terminal, start rviz
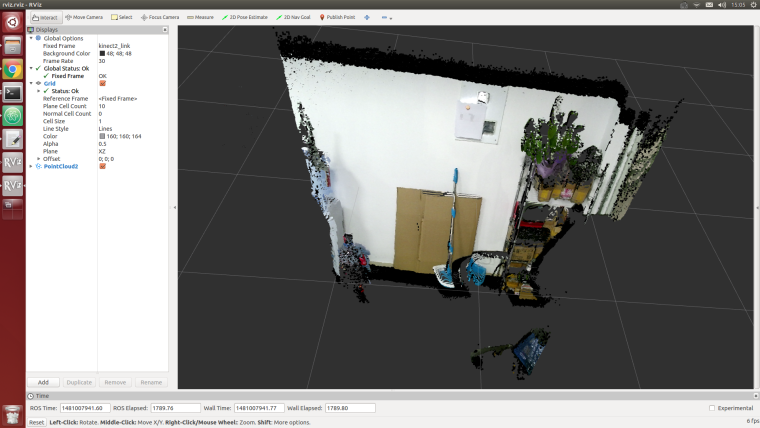
rvizOpen this rviz configuration file
/home/xiaoqiang/Documents/ros/src/iai_kinect2/kinect2_bridge/launch/rviz.rviz, Click to download this file. If everything is normal, an interface similar to the one below can appear