ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强的远程协助功能
-
为了为您提供更好的服务,在2016年6月之后发售的小强都默认安装了远程协助软件。通过这个软件我们的技术人员能够直接连接到您的小强,为您解决技术问题。当然您也可以通过远程协助去更加方便的远程遥控自己的小强。下面介绍一下小强的远程协助功能的具体使用方法。
确认远程协助是否已经启动
在终端执行
htop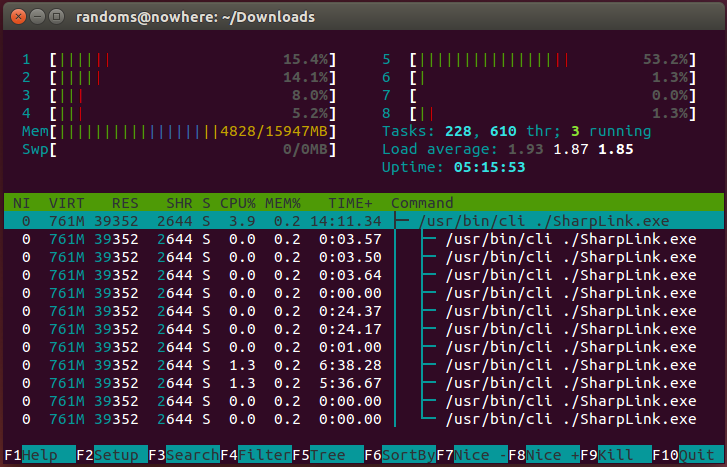
如果能够看到叫做
SharpLink的线程正在执行说明远程协助已经开始执行了。
还可以通过更简单的方法确认程序的状态,执行一下指令sudo service sharplink status如果终端显示
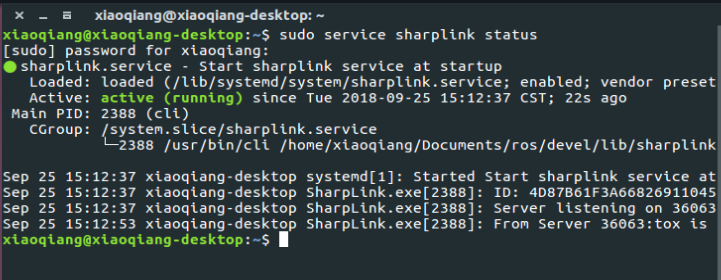
则说明程序已经正常执行了。
远程连接小强
查看自己的ID
每台小强都有一个自己的ID,请不要轻易的告诉别人。因为如果你没有更改默认密码,别人又知道你的ID的话,那么他就可以轻易的对你的小强进行操作。
查看ID的方法也非常简单,在终端执行sudo service sharplink restart bwgetid此时终端的输出为
D70101972AB9B7E674290A25485B3752EDA236F65EF2C4AC7E738390DA61903565E68B8C431B这个很长的字符串就是您的ID。
如果您想要我们提供远程协助,只需要把这个ID告诉我们的工作人员就可以了。远程连接自己的小强
在记住自己的ID之后,只要您的小强连接上互联网,您就可以在任意地方随时的控制它,不会受到路由器,局域网的限制。首先在您的电脑上安装SharpLink,这个软件是跨平台的,无论是Linux还是Windows都可以安装。安装的具体方法在项目的介绍里面。
安装完成之后,在终端执行
./SharpLink.exe 9999 你的ID 127.0.0.1 22这个指令会把本地9999端口和小强的22端口映射起来。只要连接本地的9999端口你就可以和小强的22端口相连了。当然你也可以把9999换成自己喜欢的端口。
此时在本地电脑上执行
ssh -p 9990 xiaoqiang@127.0.0.1等待连接完成就可以控制小强了。
打开和关闭远程协助
如果你想要关闭远程协助也是非常简单的。在终端删除对应的服务文件就可以了。
sudo systemctl disable sharplink如果你想重新打开远程协助服务
sudo systemctl enable sharplinkEnjoy it!
-
此回复已被删除!