ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
如何恢复小强中被修改的软件包
-
在使用小强的过程中可能会对小强中的相关软件进行修改。很容易出现修改后小强不能正常工作的情况。下面介绍如何恢复小强的相关软件。
小强的相关软件都是通过git进行代码管理的。任何对代码的更改都是有迹可循的,也是可以恢复的。下面以startup软件包为例进行说明。
假设我们修改了小强的startup软件包,导致有些启动项没有正常运行。如何查看我们做了哪些修改呢?可以通过下面的指令
# 进入startup 软件包所在目录 roscd startup # 查看我们进行了哪些修改 git diff如果有修改我们可以看到下面的输出
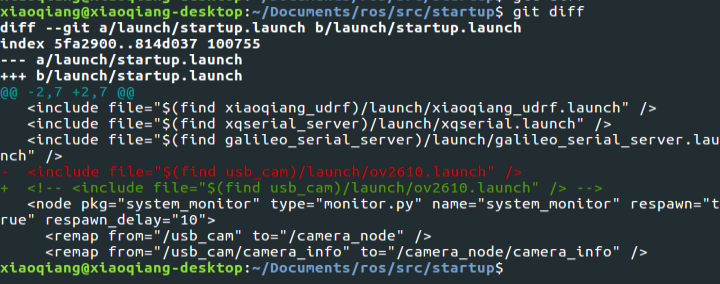
从这里我们可以看出usb_cam包的launch文件被注释掉了。这样小强就不会开机自动启动摄像头了。
如果我们想要恢复到原来的文件状态,可以执行下面的指令。
# 进入startup 软件包 roscd startup # 撤销所有更改 git stash
可以看到刚才的更改已经被撤销了。
如果你不习惯使用命令行进行操作,我们也可以使用vscode进行操作。
通过vscode打开startup软件包。
点击左侧第三个按钮,进入代码管理界面
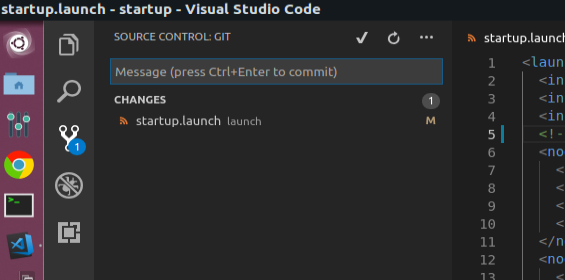
可以看到这里列出了startup.launch文件被修改
想要查看修改内容,只需要点击对应的文件即可。
可以看到usb_cam那一行被标记修改过了。
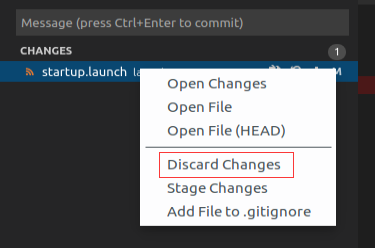
如果想要撤销修改可以右键单击文件,在弹出的菜单中选择撤销更改。
以上是代码的恢复。但是仅恢复代码有时小强还是无法正常工作。对于startup软件包来说,要需要重新注册启动项后,更改才能生效。对于启动项的注册可以查看小强用户手册。
对于需要编译的代码,代码需要在重新编译后才会生效。比如
xqserial_server在进行更改后需要# 进入小强工作空间 cd ~/Documents/ros # 编译xqserial_server软件包 catkin_make -DCATKIN_WHITELIST_PACKAGES="xqserial_server"编译成功后
sudo service startup restart这样更改才能生效。对于进行了很多修改,而以上恢复办法仍无法让小强正常工作时,那只能用重装系统大法了
-
This post is deleted!