ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
利用ros实时显示测试数据
-
ros内部非常适合程序间进行通信,其内部又包含了非常方便的图标工具。下面就是一个用ros提供的工具做实时的舵机角度显示的例子。
先看看效果吧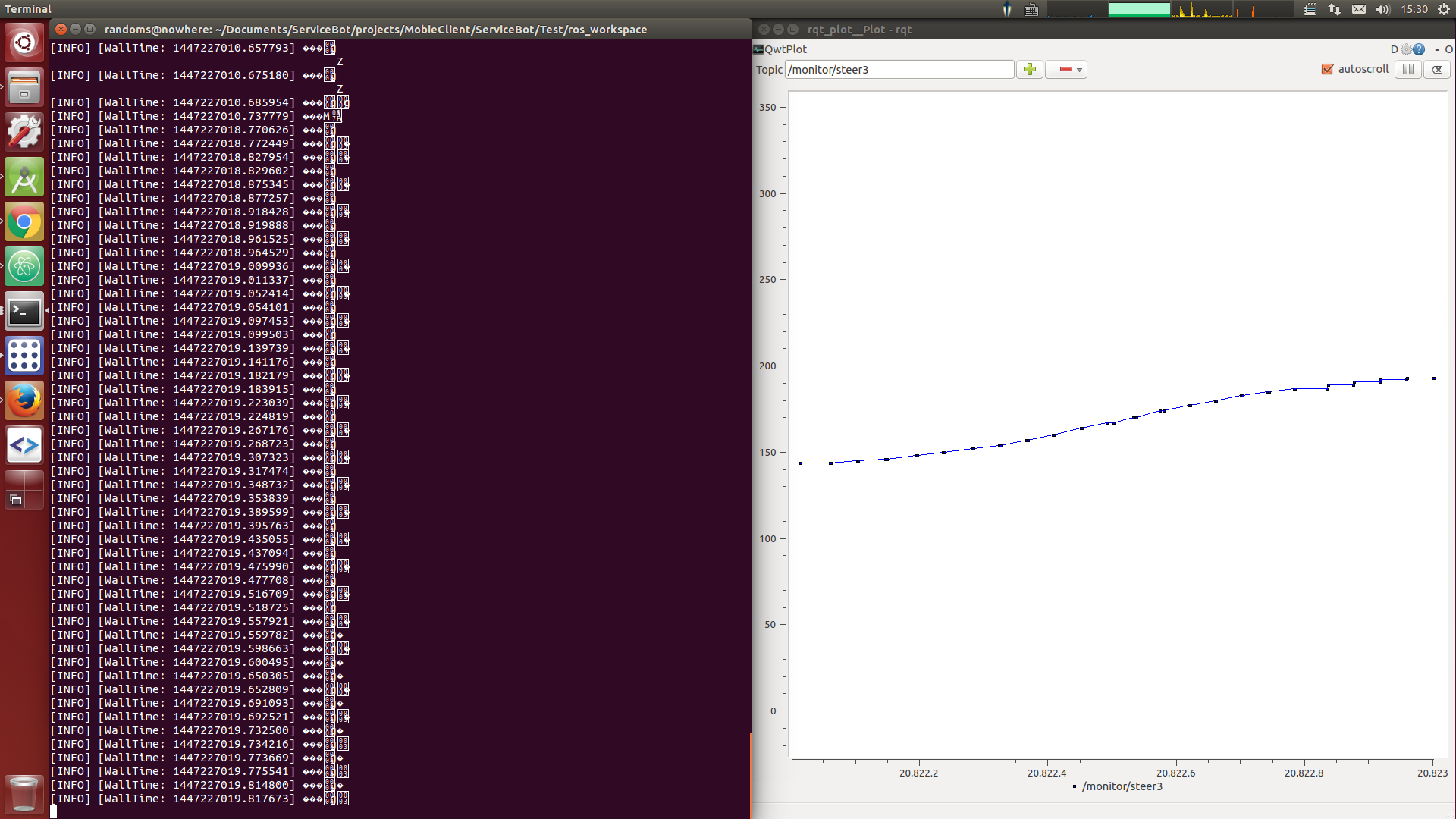
左侧是程序的log输出右侧是画出的角度图。
程序的整体结构也是比较简单的。由手机端发送舵机控制指令到装有ros系统的电脑。电脑收到数据后,从数据中取出各个舵机的角度,同时创建一个叫做monitor的topic。然后把角度信息通过这个topic发送出去。rqt_plot监听这个topic就可以画出各个舵机的实时的角度图了。
ok,开始写这个ros的package吧。
首先,创建一个ros workspace
cd ~/Documents mkdir -p ros/workspace/src cd ros/workspace/src catkin_init_workspace cd .. catkin_make source devel/setup.sh这时会发现目录结构如下图

接着创建一个ros package
catkin_create_pkg statusmonitor std_msgs rospy roscpp roscd statusmonitor
现在的目录结构应该如上图所示
src文件夹内创建monitor.py内容如下
#!/usr/bin/env python # license removed for brevity import rospy import socket from statusmonitor.msg import * import cmds as Commands import threading PACKAGE_HEADER = [205, 235, 215] dataCache = [] def getDataFromReq(req): pass def unpackReq(req): global dataCache res = [] packageList = splitReq(req) # process the first package completeData = dataCache + packageList[0] packageList.remove(packageList[0]) packageList = splitReq(completeData) + packageList for count in range(0, len(packageList)): if len(packageList[count]) != 0 and len(packageList[count]) == packageList[count][0] + 1: res.append(packageList[count][1:]) lastOne = packageList[-1:][0] # the last one if len(lastOne) == 0 or len(lastOne) != lastOne[0] + 1: dataCache = lastOne return res def findPackageHeader(req): if len(req) < 3: return -1 for count in range(0, len(req) - 2): if req[count] == PACKAGE_HEADER[0] and req[count + 1] == PACKAGE_HEADER[1] and req[count + 2] == PACKAGE_HEADER[2]: return count return -1 def splitReq(req): res = [] startIndex = 0 newIndex = 0 while True: newIndex = findPackageHeader(req[startIndex:]) if newIndex == -1: break res.append(req[startIndex: startIndex + newIndex]) startIndex = newIndex + 3 + startIndex res.append(req[startIndex:]) return res def parseData(cmds): res = None for count in range(0, len(cmds)): if chr(cmds[count][0]) == Commands.CMD_STEER_SET: if cmds[count][1] == 1: res = Steer1() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub1.publish(res) if cmds[count][1] == 2: res = steer2() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub2.publish(res) if cmds[count][1] == 3: res = steer3() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub3.publish(res) if cmds[count][1] == 4: res = steer4() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub4.publish(res) if cmds[count][1] == 5: res = steer5() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub5.publish(res) if cmds[count][1] == 6: res = steer6() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub6.publish(res) if cmds[count][1] == 7: res = steer7() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub7.publish(res) if cmds[count][1] == 8: res = steer8() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub8.publish(res) if cmds[count][1] == 9: res = steer9() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub9.publish(res) if cmds[count][1] == 10: res = steer10() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub10.publish(res) if cmds[count][1] == 11: res = steer11() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub11.publish(res) if cmds[count][1] == 12: res = steer12() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub12.publish(res) if cmds[count][1] == 13: res = steer13() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub13.publish(res) if cmds[count][1] == 14: res = steer14() res.angle = cmds[count][2] * 0xff + cmds[count][3] pub14.publish(res) return res class handleSocket(threading.Thread): def __init__(self, conn, addr): threading.Thread.__init__(self) self.conn = conn self.addr = addr def run(self): print 'Connection address:', addr while 1: data = conn.recv(BUFFER_SIZE) if not data: break conn.send(data) # echo rospy.loginfo(data) dataList = [] for c in data: dataList.append(ord(c)) parseData(unpackReq(dataList)) conn.close() if __name__ == '__main__': pub1 = rospy.Publisher('monitor_steer1', Steer1, queue_size=10) pub2 = rospy.Publisher('monitor_steer2', steer2, queue_size=10) pub3 = rospy.Publisher('monitor_steer3', steer3, queue_size=10) pub4 = rospy.Publisher('monitor_steer4', steer4, queue_size=10) pub5 = rospy.Publisher('monitor_steer5', steer5, queue_size=10) pub6 = rospy.Publisher('monitor_steer6', steer6, queue_size=10) pub7 = rospy.Publisher('monitor_steer7', steer7, queue_size=10) pub8 = rospy.Publisher('monitor_steer8', steer8, queue_size=10) pub9 = rospy.Publisher('monitor_steer9', steer9, queue_size=10) pub10 = rospy.Publisher('monitor_steer10', steer10, queue_size=10) pub11 = rospy.Publisher('monitor_steer11', steer11, queue_size=10) pub12 = rospy.Publisher('monitor_steer12', steer12, queue_size=10) pub13 = rospy.Publisher('monitor_steer13', steer13, queue_size=10) pub14 = rospy.Publisher('monitor_steer14', steer14, queue_size=10) rospy.init_node('talker', anonymous=True) TCP_IP = '0.0.0.0' TCP_PORT = 50000 BUFFER_SIZE = 1024 # Normally 1024, but we want fast response s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) s.bind((TCP_IP, TCP_PORT)) s.listen(1) while 1: conn, addr = s.accept() handleSocket(conn, addr).start()从程序入口开始说明。首先创建了一系列的ros的publisher,这个可以用来向topic发送信息。然后初始化ros节点。
接着创建一个socket,监听发送由机器人控制端发送来的指令数据。收到数据后就把数据包解开,提取处各个舵机的角度,通过最开始创建的publisher发送出去。主程序就是这样,下面开始创建ros message。在src文件夹内创建msg文件夹,并在其中创建Steer1.msg到Steer14.msg,这些文件的内容都是一样的
float32 angle float32 resmsg文件就是表明msg的格式的文件。之后编译包的时候这些文件会被编译成c++文件和python文件。
接着就是修改makefile,因为msg是需要编译的嘛。find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation )第一步就是在find_package中添加message_generation
然后添加msg文件add_message_files( FILES Steer1.msg Steer2.msg Steer3.msg Steer4.msg Steer5.msg Steer6.msg Steer7.msg Steer8.msg Steer9.msg Steer10.msg Steer11.msg Steer12.msg Steer13.msg )在generate msg 添加 std_msg
generate_messages( DEPENDENCIES std_msgs )在依赖中加入message_runtime
catkin_package( # INCLUDE_DIRS include LIBRARIES statusmonitor CATKIN_DEPENDS roscpp rospy std_msgs message_runtime # DEPENDS system_lib )到这里就应该差不多了。
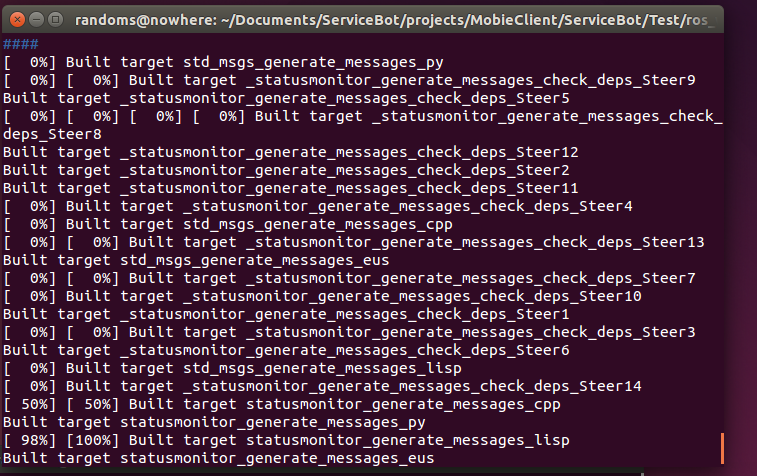
开始编译
cd ~/Documents cd ros/workspace/src catkin_make如果输出如下图就说明编译正确
下一步就是开始运行了
source devel/setup.sh rosrun statusmonitor monitor.py这样当收到控制端发送来的数据时就会如下显示
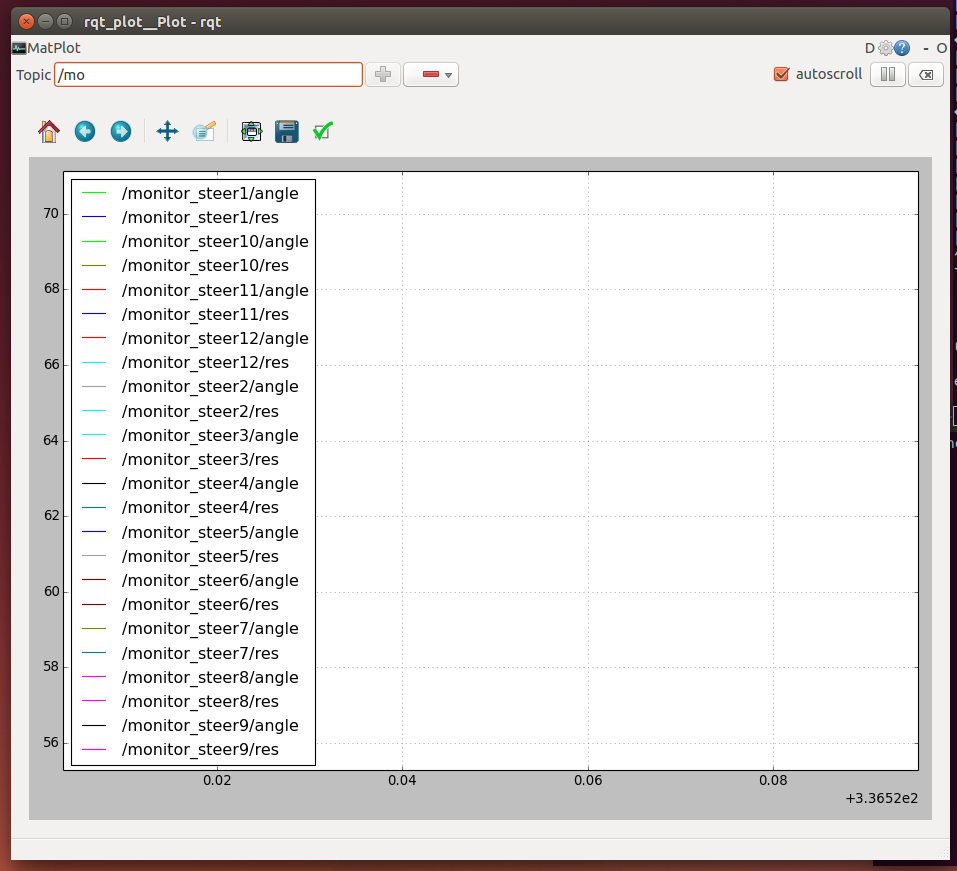
在一个新终端中启动rqt_plot,然后选择想要观察的topic就行了