ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
导弹制导系统简介
-
Guided Missiles
In this article I’m going to write about missile guidance systems and how these have developed and become more sophisticated over the years. This will be a high level look to give an appreciation of the concepts and techniques used.Translation: If you work in the defence industry, please don’t email to remind me it is a little bit more complicated than I have explained it here!
Before we start, it’s worth taking a step back to find out a little more about this subject.
What is a missile?
The first question to answer is what a missile is, and what distinguishes it from a rocket, bomb or other projectile weapon?
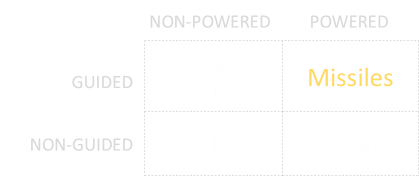
The simple answer is that a missile has a guidance system to allow it to steer and change course towards its intended target, and also a propulsion system that self drives it.
Munitions that are not self-powered and have no self-guidance are things like bullets, arrows, darts, artillery shells and cannon shot. Old school conventional bombs aka dumb-bombs also fall into this category. Once fired they are at the mercy of gravity and other external forces like drag and wind.

Some projectiles can self-propel, such as those pushed by rockets or even small jet-engines. These might even have inertial or stability platforms to allow them to fly more predefined paths, but they can’t change course if their intended targets move.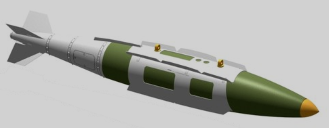
An additional class of weapons can change direction, but are not powered. These are typically released from planes, then drop down, changing course as needed through either GPS or following laser designated signals. In modern times, ‘smart bomb’ kits have been retrofitted to conventional dumb ‘iron bombs’. These consist of steerable fins, and an optional intelligent sensing nose cone. A smart bomb becomes a (very inefficient) glider and steers itself to the target.
Missiles
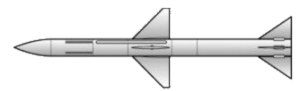
Missiles have both propulsion systems and guidance systems.


Image: Official US Naval ImageryMost missiles also contain a payload (typically an explosive warhead), and also a proximity fuze*. Contrary to what you might expect, a missile does not have to hit its target to explode. Especially in the province of an air target. Getting ‘close-enough’ is good enough to make an effective hit. Once the proximity fuze has triggered, the warhead explodes showering the target with thousands of pieces of very sharp, supersonic chunks of shrapnel complete with a pressure wave and lots of hot expanding gases. Aircraft are comprised of many delicate, balanced, and critical pieces of highly precision components (and often a couple of warm fleshy ones), typically protected by a very thin skin. Some of these components are rotating at high speed, and others can be very explosive. Some are needed to control and stabilize the aircraft. Damaging to even a small number of these essential components can critically harm the target and effectively destroy it.
*In common vernacular “FUZE” is used to identify complex trigger mechanisms and “FUSE” is reserved for a simple burning trigger.
Not all missiles have proximity fuzes, some are intended to hit their target. These transfer their kinetic energy directly to the target, acting more like large guided bullets. These are usually smaller in size (not needing an explosive warhead), but need to be more accurate. A very fast moving chunk of metal is going to do serious damage as it passes through a target, even if it does not explode!
It’s possible to go the other way too and make a large missile with a larger warhead that has an effective destructive radius that is much greater. With a larger explosive payload the definition of “close enough” gets less precise.
Ordnance History

Long ago, if you wanted to hurt someone or something, you might have thrown a rock at them. The bigger the rock, and the faster you can thrown it, the more energy you can impart on your target.Higher speed is triply good; it allows you to throw the rock a further distance, and the energy carried by the rock is proportional to the speed squared. Finally, a faster speed means your rock gets to the target quicker and there is less chance it will have moved since launch!
Soon, machines were designed to throw rocks for people. These allowed heavier rocks to do thrown, and also at greater speeds. They also provided some degree of control; They could be coarsely adjusted to aim for their intended target by pointing them roughly in the right direction, and adjusting the tension of the launch mechanism (or adjusting the mass of the projectile).
All these devices, however, are still essentially just ballistic devices. And, after launch, there was no control over the destiny of the projectile. You’d give it momentum and it would then be at the mercy of gravity and other aerodynamic forces. With the invention of gunpowder, cannon could be made. Cannon b***s travel much faster than slung rocks and so have much more destructive energy. They still suffered from accuracy problems. Two identical shots fired directly after each other with the same conditions would not necessarily hit the same locations.Early guns and muskets used round shot (miniature cannon b***s) and with tolerance limitations these shot were smaller in diameter than their barrels. As they were fired, they rattled down the barrel giving them unpredictability in their path after release. Once they left the barrel, they also drifted through the air in irregular ways depending on their spin. They were not very accurate.

Accuracy was greatly improved by rifling the barrel of the gun. Rifling involves the cutting of helical grooves down the length of the barrel. A tightly fitting bullet is imparted spin as it is accelerated down the barrel. This spinning provides gyroscopic stability. Bullets also became more aerodynamically shaped.

Bullets were integrated into complete cartridges which provided casing, propellent, and a primer in one package. Improvements in propellants (creating higher pressure behind the bullet) and longer barrels (for more acceleration before exiting the gun), produced impressive muzzle velocities. Modern guns are pretty efficient machines, and at short to medium distances they are very effective.
Hey, keep still I’m trying to shoot you!Bullets can travel fast, but sometimes that is not fast enough. It takes time for the bullet to leave the gun and reach the target. During that time, the target could have moved,
If the target is moving in a very predictable and defined way it might be possible to ‘lead in’ and fire to where the target will be by the time the bullets get there. This technique is known very well to fighter pilots who give it the term Deflective Shooting.
This is also why, in American Football, Quarterbacks throw the ball ahead of the running receivers. They throw the ball to where the receiver will be when the ball arrives.
Stop jerking around, I’m still trying to shoot you!

Typically, the people you are trying to shoot want to avoid being shot and take evasive manoeuvres! They are not going to fly in straight lines or in predictable fashion. They are going to jinx, turn, feint, make random steering changes, adjust their speed and generally squirrel around.(There can also be other factors outside of your control affecting accuracy. For instance, there could be additional wind forces acting on the bullets. Tolerances in manufacture might mean that the bullets don’t always fly in the same path. Even if a shot is lined up, the bullets might not make their expected target).

The ultimate solution would be to have the projectiles find the target themselves (bypassing external dependencies, randomness and unpredictable target manoeuvring). We’re now getting in the the territory of missiles. It would be nice to fire our weapon towards a target, and the weapon itself chase the target until sufficiently close to do the damage needed.Missiles
We’ve now reached the point of understanding why missiles are so important in modern warfare: Many targets are dynamic and move. To take down a random moving target requires an ordnance that is smart enough to manoeuvre, follow, chase and hopefully get close enough to cause damage. However, the verbs “follow” and “chase” hide quite a lot of subtly in implementation, as we will see …Over the years, more and more sophisticated systems have been developed to implement guidance control rules. In roughly chronological order, and complexity are:
1.Line of sight
2.Pure Pursuit
3.Proportional Navigation
Line of sight
This is a very simple control system and relies on the use of a base station that is constantly tracking the target.
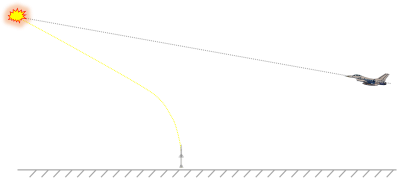
In Line of sight guidance, there is a reference point (in this case depicted by a ground radar station, but it could be a moving platform). Radiating out from this reference point is a beam pointing at the target. In LOS guidance, control signals are sent to the missile to keep it on this beam.If the missile stays on the beam pointed at the target, and has sufficient fuel and a fast enough relative speed, it will attain the target.
Course deviations are given to the the missile in the form of lateral acceleration requests (steering commands), to attempt to keep the perpendicular distance from the beam to zero.
There are two sub-classes of LOS, and these are CLOS (Command Line Of Sight) and BR (Beam Rider). In CLOS, the reference point is tracking both the target and the missile. Command signals are sent directly to the missile through some communications channel (either radio, or through a paid out thin umbilical cable that streams out behind the launched missile). These command signals give the course correction signals for the required lateral manoeuvres. This was is the control method that the first generation of guided missiles used. The disadvantages of this system are obvious: Constant communication between the missile and the ground station are required, and the reference station has to keep tracking both the target and the missile. The brains of the missile reside in the tracking station.
With BR guidance, the tracking station paints the target with some signal (typically a laser) and the missile uses onboard sensors (optical in the case of lasers), to ensure it stays riding along the middle of the beam. A BR missile does not require signals from the tracking station, and in this configuration, the tracking station only needs to track the target.
It’s not a requirement for the reference point and the missile launch site to be in the same location. The launched missile will follow its control law and quickly minimize the perpendicular distance to the Line of Sight.
Limitations of LOS
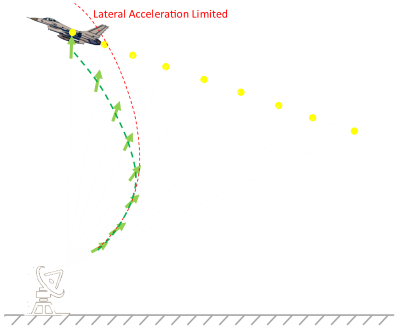
As mentioned earlier LOS was the control law used in the first generation of guided missiles, and it works reasonable well on targets that are not using excessive evading manoeuvres. As we will see later, however, as the missile gets closer, if the target is manoeuvring aggressively, high lateral acceleration requests are needed to keep it pointing at the target. It’s possible for these requests to exceed the limitations of the weapon, and if that happens the missile will overshoot and miss.
This can also occur when the target is approaching the reference point directly, as in the diagram below. The missile heads towards the target, constantly turning and pointing at it. As the target passes overhead, the missile needs to make tighter and tighter angular accelerations to continue pointing at the target. Eventually it may reach its turn limit and cannot turn any faster. If this happens, because of its speed, it will overshoot the target.
Because of the constant tracking needed by a reference station, LOS missiles can never reach the “Fire and Forget” sophistication level. If the reference platform is also moving (for instance if the reference platform is on another plane), then it will need to keep orientated vaguely in the direction of the target (until it is destroyed) in order to continue tracking the missile. This is not desirable in a combat situation.
Pure Pursuit
Pure Pursuit reduces the number of involved actors from three (reference point, missile, target) to just two (missile and target). In Pure Pursuit, the missile autonomously tracks the target and chases it directly, attempting to point at it the entire time.
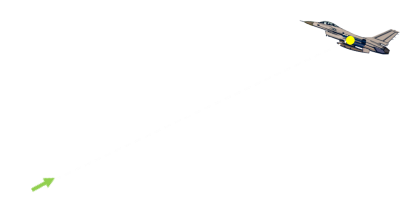
There are actually two variants of this control law, one is Attitude Pursuit, and the other is Velocity Pursuit. In AP, it is the axis of the missile that is kept pointing at the target. In VP, the missile’s velocity vector is the thing aimed at the target. These two are typically different vectors because the angle of attack of the missile is not aligned with the axis of the missile as it flies and skids across the sky. (It is VP that appears to perform better in real life.)

In the head of the missile is some kind of sensor array that is used to track the target (for instance an Infra Red optical sensor for a heat seeking missile). This is mounted on a gimbal, and moves to orient the array with the target. In simple AP law, the angle the sensor points away from the missile axis is the angle used to correct the course to point at the target. (In VP a vane on the side of the missile is also used to determine the direction the missile is traveling through the air).
Pure Pursuit guidance laws suffer the same late-stage extreme lateral acceleration request issues that LOS laws experience (especially when pointed at a target that is travelling towards the radar, rather than a tail-chase).Deviated Pursuit
Rather than pointing directly at the target, in an attempt to reduce the chance of getting into lateral acceleration limit (as outlined above), a technique called deviated pursuit can be employed. This is similar to the deflective shooting technique described that fighter pilots and quarterbacks use to lead-in to their targets. With a deviated pursuit control law, the steering commands request the missile be pointed a (fixed) couple of degrees ahead of the aiming angle. This helps point the missile to a location where the target shortly will be, and attempts to steer the missile based on knowledge of the targets path; this helps reduce chances of needing extreme lateral acceleration requests.
Gimbal limits
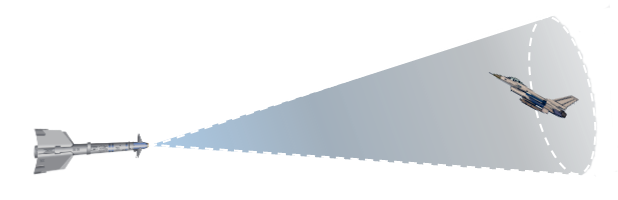
With guided missiles, it’s not just the physical limitations of the turn radius of the missile (which can be incredibly high), it’s the limitations of the sensor cradle too. The sensor gimbal has a maximum arc of sweep over which it can move to track the target, and also a maximum rate at which it is able swivel to keep the target in view. If the target can manoeuvre outside the sensor cone, it can ‘disappear’ from view.
A pure pursuit control law is like a predator chasing a prey in the animal world. For this reason, it is sometimes described as a ‘hound-hare pursuit’ and also as a scopodrome [skopien = to observe, dromos = act of running]. It typically results in a tail chase.
There’s a hole branch of mathematics dedicated to pursuit curves and the loci of their paths. The curves have interesting patterns depending on the ratio of their relative speeds, the distances apart, the lateral acceleration limits of each entity, and the style of the evasive manoeuvres taken by the target.
Proportional Navigation
The next level of sophistication in guidance is called Proportional Navigation. To understand Proportional Navigation we need to look at the concept known to mariners of Constant Bearing Angle (Decreasing Range).
Ships at sea are constantly worried about collisions with other ships. It’s good to know when there is a potential for this so that evasive manoeuvres can be taken. Just because the paths of two ships will cross, it does not mean that a collision will occur. For a collision, both ships must be in the same location at the same time. Paths have to cross for a collision to be possible, and the relative speeds are important to determine if both entities will arrive at the cross over point at the same time.

There are many ways to think about this. If you imagine you are on one of the ships, set this as your reference platform, and subtract your velocity from the other ship, you get the other ships velocity relative to you. It’s as is you are standing still, and the other ship is moving. If the relative velocity of the other ship brings it on a vector directly towards you, it means a collision will happen.Another way to imagine this is two cars racing down roads to a cross-road junction (or other intersection). Both could be travelling at different speeds. Will they collide?
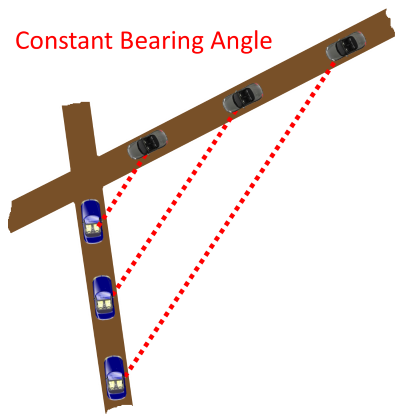
Imagine you are the passenger in one of the cars looking out the window. As you look out the window and spot the other car you might find that something interesting happens. If the other car keeps the same position out of the window as you race along, a collision will happen. If the angle of the other car to you gets tighter over time. it’s going to pass the intersection before you. If it gets wider, you’ll cross before it.If the angle remains constant, there is trouble ahead!
This is what sailors have known about for centuries. If you spot a ship on the horizon, and measure your bearing to it, then wait a little while and take a second bearing, and it is the same, then watch out, you are on a collision course (The caveat is that the ship also has to be getting bigger too! Hence the additional requirement of ‘Decreasing Range’. If the ship is getting smaller, it means it’s heading directly away from the potential collision point!)
If there is no relative velocity between two entities perpendicular to their LOS (and the entities are approaching each other), then a collision will occur!
What is bad for sailors (and reckless car drivers) is good for missiles …
Proportional Navigation
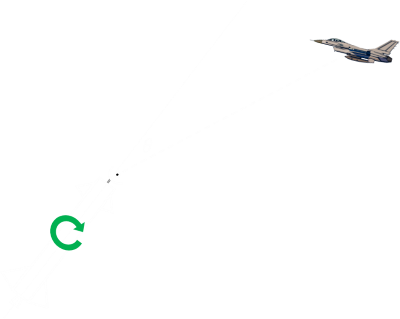
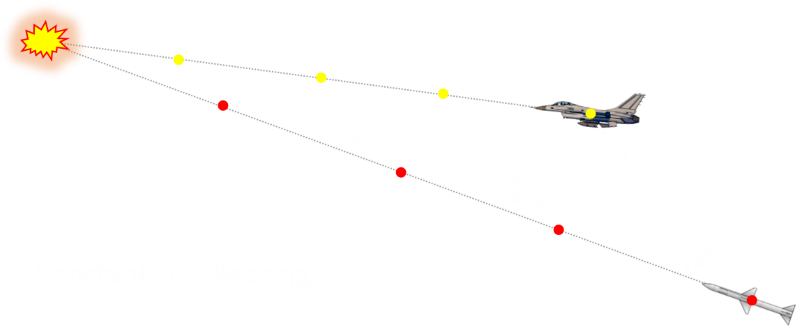
If a missile keeps on a trajectory with a constant bearing angle to the target, then it is sure to eventually hit the target. It does not chase or follow the target. What it does is fly a path that will place it in the same location as the target some time in the future.
PN law uses the idea that if the LOS rate at any time is non-zero then the guidance command applied should be such that it annuls the LOS rate. In fact the lateral acceleration generated is made proportional to the LOS rate and the closing velocity. The scaling coefficient multiplying the error term is usually given a value between 3 and 5 (read a more advanced text book for why this range of values is appropriate).A PN guidance system has many advantages. It avoids potentially large lateral acceleration demands as it is not required to tail-chase the target, and has the potential to attain it’s target with less fuel expended than a system which tail chases (giving it a more effective range). If the target makes evasive manoeuvres, a PN missile can take corrective action by turning to keep the bearing angle constant; when this happens, the angular acceleration required by the missile is less because of its distance away from the target.
A PN law can almost be thought of as a ‘far sighted’ algorithm as it attempts to take corrective action right from launch. If fired at a non-manoeuvring target, then pretty much as soon as launched, it is quickly set up for a hit solution and no other guidance adjustments are needed for the rest of the flight (save for some minor tweaks), this improves reliability and hit success. As we saw above, the less sophisticated guidance laws require the highest acceleration manoeuvres right before impact!
To an external observer, a PN launched missile might look a little strange (especially if the target is heading towards the launcher). Rather than aiming at the target, the missile might leave the launcher in the opposite direction expected! (in the same direction as the target) As the target flies overhead, it will set up a course with constant LOS bearing angle, and simply fly into the target.
If you were on the target aircraft looking out, you would never see the missile pointing at you (as you would for the other control schemes). Instead, you would observe the missile streaking out to a not quite parallel point which you were also flying towards.It’s not all roses. Whilst a vanilla PN algorithm accounts for the target velocity and uses this to determine the collision point, it does not take into account the acceleration of the target (changing of speed along its path). The basic PN is also very sensitive to sensor noise. There are various enhanced versions of the PN algorithm that add in a measured acceleration term from the target. These algorithms are given the name Augmented Proportional Navigation guidance systems. APN algorithms attempt to ensure that all the large lateral accelerations required occur early on in the flight. (A further optimization described by the phrase Modern Guidance System, or MGS attempts to minimize all the lateral accelerations required over the entire flight. Every time an angular correction is needed, control surfaces need to be deflected. This causes drag, and drag both reduces the speed of the missile and it’s effective range).
Real Missiles
The above descriptions give a very simplistic view for how missile guidance works. In reality, there are three separate phases that a missile goes through. These phases are boost, midcourse, and terminal. There are separate guidance laws for each phase.
In the boost phase, the missile is accelerating up to speed at which it can be controlled (this may be performed by an expendable secondary stage). The launcher might also have some input as to the azimuth and elevation from which the missile is initially launched. For aircraft launched missiles, an added complication is to make sure the missile engine, when ignited, does not damage the launching aircraft!In the midcourse phase the missile might still be guided by external control (or not in the case of an autonomous missile).
The terminal phase (homing phase) is where the missile tries to get as close as possible to the target.
It’s more than just guidance
Finally, this article was just a basic introduction into guidance systems of missiles. Missiles, however, are very complex dynamic machines requiring skills in many disciplines.
They are precision devices that need to fly, be stable, be controlled, be lightweight, have good speed, be extremely manoeuvrable, not break apart with the stress of flight and launch, be reliable, have long shelf life, effective at destroying a target, cope with the stress of hanging off a pylon of a manoeuvring plane, be function at a wide range of temperature conditions, detect and track targets, not be spoofed by decoys, chaff and noise …
They also need cool names.
本文转自http://www.datagenetics.com/blog/august22014/index.html