ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
新手求教关于重新注册startup service 以及 display.launch 的问题
-
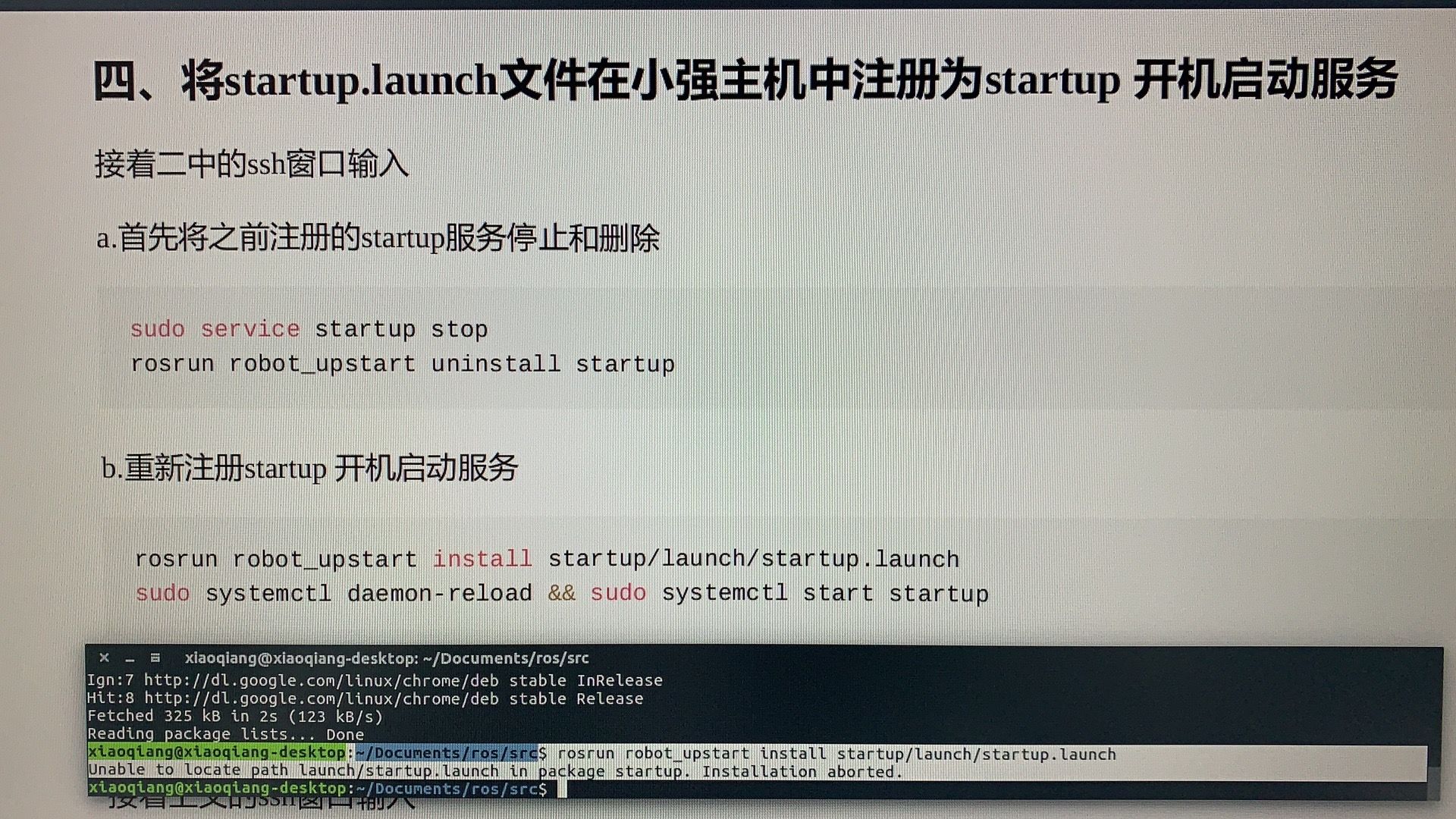
(1)
(2)xiaoqiang@xiaoqiang-desktop:~$ roslaunch xiaoqiang_udrf display.launch
[display.launch] is neither a launch file in package [xiaoqiang_udrf] nor is [xiaoqiang_udrf] a launch file name
The traceback for the exception was written to the log file -
@小瘪二 在 新手求教关于重新注册startup service 以及 display.launch 的问题 中说:
[display.launch] is neither a launch file in package [xiaoqiang_udrf] nor is [xiaoqiang_udrf] a launch file name
你是不是重装过系统或者改过ROS工作空间路径
-
@weijiz 没有啊,刚买回来就按照手册一步步做的。
-
@小瘪二 现在环境变量有问题,你看看 ~/.bashrc这个文件的最后是什么样的
-
@weijiz 没有查到有叫这个名字的文件啊
-
@weijiz 只有一些叫/.bash的
-
@小瘪二
gedit ~/.bashrc发一下最后的内容
-
enable programmable completion features (you don’t need to enable
this, if it’s already enabled in /etc/bash.bashrc and /etc/profile
sources /etc/bash.bashrc).
if ! shopt -oq posix; then
if [ -f /usr/share/bash-completion/bash_completion ]; then
. /usr/share/bash-completion/bash_completion
elif [ -f /etc/bash_completion ]; then
. /etc/bash_completion
fi
fi
source /opt/ros/kinetic/setup.bash
source /home/xiaoqiang/Documents/ros/devel/setup.bash
export PATH=/home/xiaoqiang/Documents/xiaoqiang-cmds:$PATH
alias sudo=‘sudo env PATH=$PATH’
ulimit -c unlimited
source /opt/ros/kinetic/setup.bash -
@小瘪二 在 新手求教关于重新注册startup service 以及 display.launch 的问题 中说:
source /opt/ros/kinetic/setup.bash
把最后一句
source /opt/ros/kinetic/setup.bash删除掉,然后重新打开一个终端