@weijiz 谢谢
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
robot0612 发布的最新帖子
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
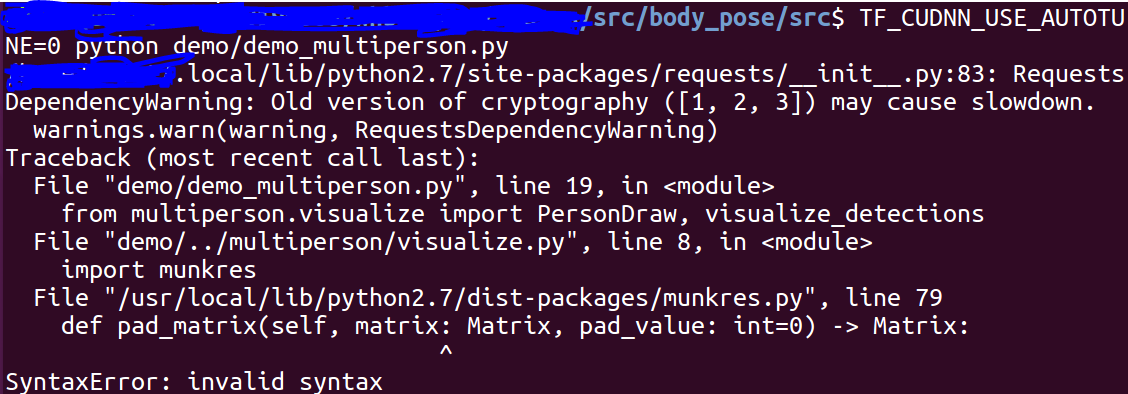
我的问题解决了:方法:1、先采用指定的方法编译body那个功能 2、下载源代码 3、编译这个源码、但是还是会出错 3、指定这个包编译,第一次还是出错,我运行了第三次才成功,不知道为什么。但是最终是解决了:
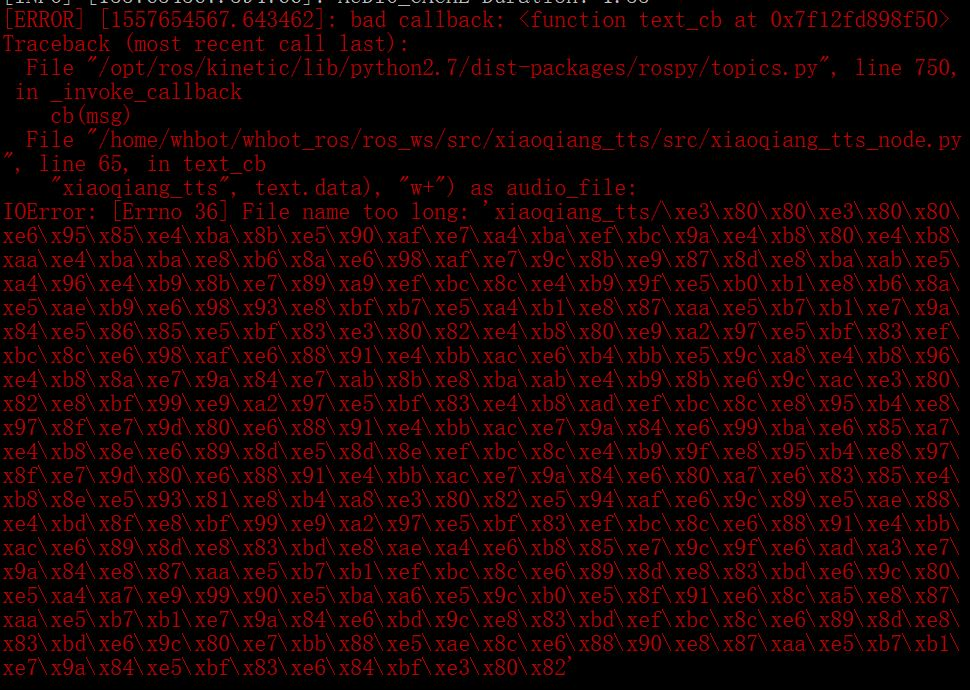
fatal error: pathwithflag_msgs/PathWithFlag.h: 没有那个文件或目录
#include <pathwithflag_msgs/PathWithFlag.h>原因:当自定义msg文件之后,然后又在其他文件中使用了该自定义msg类型。因为catkin_make在编译的时候并不会指定pkg的编译顺序,
所以在使用该msg的文件编译的时候新建的msg类型还没有编译,导致找不到头文件。
解决:先编译包含新建msg的pkg,再编译其他pkg:
$ catkin_make -DCATKIN_WHITELIST_PACKAGES= “包名”
$ catkin_make -DCATKIN_WHITELIST_PACKAGES= “” //重新编译所有pkg