@氵叶雨 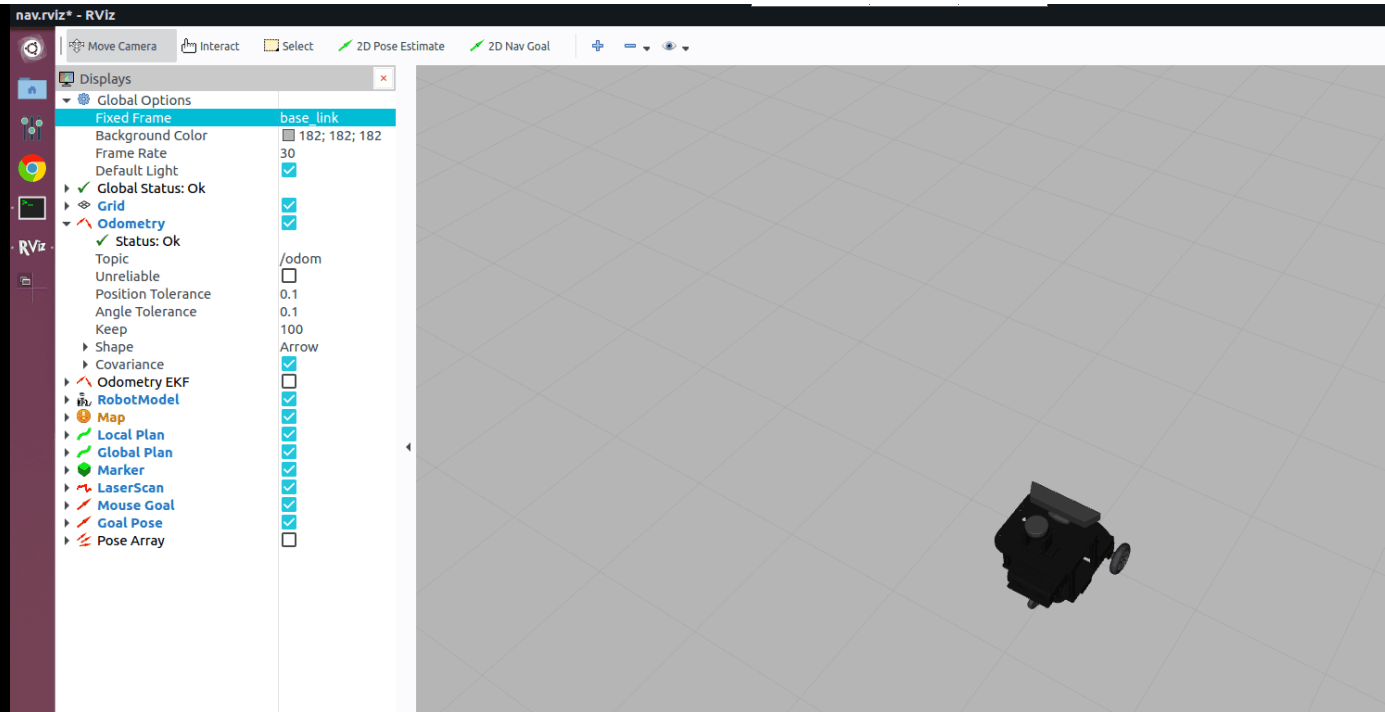 使用rviz打开/ros/src/nav_test/config/nav.rviz图像没有四个方块和方向箭头
使用rviz打开/ros/src/nav_test/config/nav.rviz图像没有四个方块和方向箭头
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
氵叶雨 发布的最新帖子
-
RE: 惯性导航自主移动测试相关问题发布在 讨论区
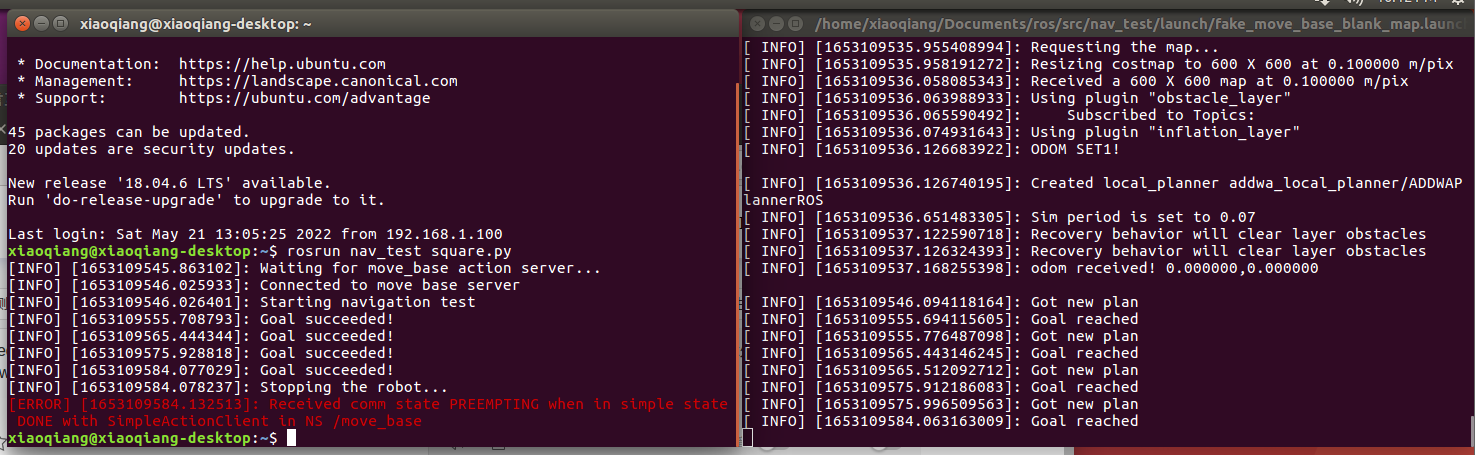
@xiaoqiang rosrun nav_test square.py
[INFO] [1626661718.488650]: Waiting for move_base action server…
[INFO] [1626661718.601555]: Connected to move base server
[INFO] [1626661718.602378]: Starting navigation test
[INFO] [1626661730.565145]: Goal succeeded!
[INFO] [1626661739.993120]: Goal succeeded!
[INFO] [1626661750.838423]: Goal succeeded!
[INFO] [1626661758.358539]: Goal succeeded!
[INFO] [1626661758.359807]: Stopping the robot…
[ERROR] [1626661758.506487]: Received comm state PREEMPTING when in simple state DONE with SimpleActionClient in NS /move_base
可以走了,但是走的歪七扭八的,还有个error[链接文本]
-
RE: 惯性导航自主移动测试相关问题发布在 讨论区
@weijiz ROS_MASTER_URI=http://xiaoqiang-desktop:11311
WARNING: Package name “ORB_SLAM2” does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
WARNING: Package name “NLlinepatrol_planner” does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
process[map_server-1]: started with pid [6561]
process[move_base-2]: started with pid [6562]
process[odom_map_broadcaster-3]: started with pid [6563]
[ INFO] [1626249538.382856208]: Loading from pre-hydro parameter style
[ INFO] [1626249538.400550817]: Using plugin “static_layer”
[ INFO] [1626249538.407213801]: Requesting the map…
[ INFO] [1626249538.611207295]: Resizing costmap to 600 X 600 at 0.100000 m/pix
[ INFO] [1626249538.710645272]: Received a 600 X 600 map at 0.100000 m/pix
[ INFO] [1626249538.721307676]: Using plugin “obstacle_layer”
[ INFO] [1626249538.723543475]: Subscribed to Topics:
[ INFO] [1626249538.733786746]: Using plugin “inflation_layer”
[ INFO] [1626249538.784556791]: Loading from pre-hydro parameter style
[ INFO] [1626249538.799147147]: Using plugin “static_layer”
[ INFO] [1626249538.803967894]: Requesting the map…
[ INFO] [1626249538.806943812]: Resizing costmap to 600 X 600 at 0.100000 m/pix
[ INFO] [1626249538.906791259]: Received a 600 X 600 map at 0.100000 m/pix
[ INFO] [1626249538.917929670]: Using plugin “obstacle_layer”
[ INFO] [1626249538.920708665]: Subscribed to Topics:
[ INFO] [1626249538.932643967]: Using plugin “inflation_layer”
[ INFO] [1626249538.974077585]: ODOM SET1![ INFO] [1626249538.974130146]: Created local_planner addwa_local_planner/ADDWAPlannerROS
[ INFO] [1626249539.507760788]: Sim period is set to 0.07
[ INFO] [1626249539.977843573]: Recovery behavior will clear layer obstacles
[ INFO] [1626249539.979909037]: Recovery behavior will clear layer obstacles
[ INFO] [1626249540.025718359]: odom received! 0.000000,0.000000
-
RE: 惯性导航自主移动测试相关问题发布在 讨论区
@weijiz SUMMARY
PARAMETERS
- /move_base/ADDWAPlannerROS/PathChange: True
- /move_base/ADDWAPlannerROS/PathChangeLazy: True
- /move_base/ADDWAPlannerROS/R: [1.0, 0.0, 0.0, 0…
- /move_base/ADDWAPlannerROS/R_laserscan: [-1.0, 0.0, 0.0, …
- /move_base/ADDWAPlannerROS/T: [-0.1, 0.0, 0.0]
- /move_base/ADDWAPlannerROS/T_laserscan: [-0.3, 0.0]
- /move_base/ADDWAPlannerROS/acc_lim_th: 8
- /move_base/ADDWAPlannerROS/acc_lim_x: 1.5
- /move_base/ADDWAPlannerROS/acc_lim_y: 0
- /move_base/ADDWAPlannerROS/add_value: 20
- /move_base/ADDWAPlannerROS/backtime: 2.5
- /move_base/ADDWAPlannerROS/bar_distance_min: 0.5
- /move_base/ADDWAPlannerROS/clear_angle12: 0.6
- /move_base/ADDWAPlannerROS/clear_angle1: -0.6
- /move_base/ADDWAPlannerROS/clear_range: 2.0
- /move_base/ADDWAPlannerROS/clear_value: 5
- /move_base/ADDWAPlannerROS/decay_value: 0
- /move_base/ADDWAPlannerROS/distance_scale: 3.2
- /move_base/ADDWAPlannerROS/forward_dist: 0.15
- /move_base/ADDWAPlannerROS/forward_max_dist: 1.4
- /move_base/ADDWAPlannerROS/forward_point_distance: 0.325
- /move_base/ADDWAPlannerROS/forward_width: 0.45
- /move_base/ADDWAPlannerROS/front_distance_bias: 10.0
- /move_base/ADDWAPlannerROS/goal_distance_bias: 10.0
- /move_base/ADDWAPlannerROS/half_length: 100
- /move_base/ADDWAPlannerROS/k2: 0.4
- /move_base/ADDWAPlannerROS/kd: 0.2
- /move_base/ADDWAPlannerROS/ki: 0.5
- /move_base/ADDWAPlannerROS/kp: 0.8
- /move_base/ADDWAPlannerROS/latch_xy_goal_tolerance: True
- /move_base/ADDWAPlannerROS/left_side_weight: 0.1
- /move_base/ADDWAPlannerROS/linear_v: 0.5
- /move_base/ADDWAPlannerROS/look_ahead_dist: 0.4
- /move_base/ADDWAPlannerROS/max_rot_vel: 0.5
- /move_base/ADDWAPlannerROS/max_scaling_factor: 0.2
- /move_base/ADDWAPlannerROS/max_trans_vel: 0.5
- /move_base/ADDWAPlannerROS/max_vel_x: 0.5
- /move_base/ADDWAPlannerROS/max_vel_y: 0
- /move_base/ADDWAPlannerROS/min_rot_vel: -0.5
- /move_base/ADDWAPlannerROS/min_trans_vel: 0.0
- /move_base/ADDWAPlannerROS/min_vel_x: 0.0
- /move_base/ADDWAPlannerROS/min_vel_y: 0
- /move_base/ADDWAPlannerROS/occdist_scale: 0.01
- /move_base/ADDWAPlannerROS/oscillation_reset_dist: 0.15
- /move_base/ADDWAPlannerROS/path_costheta: -0.5
- /move_base/ADDWAPlannerROS/path_distance_bias: 0.4
- /move_base/ADDWAPlannerROS/plan_width: 0.4
- /move_base/ADDWAPlannerROS/prune_plan: True
- /move_base/ADDWAPlannerROS/pub_localgrid: True
- /move_base/ADDWAPlannerROS/resolution: 0.05
- /move_base/ADDWAPlannerROS/rot_width: 0.6
- /move_base/ADDWAPlannerROS/scaling_speed: 0.25
- /move_base/ADDWAPlannerROS/scan_type: 0
- /move_base/ADDWAPlannerROS/sim_granularity: 0.05
- /move_base/ADDWAPlannerROS/sim_time: 2.0
- /move_base/ADDWAPlannerROS/stop_time_buffer: 0.2
- /move_base/ADDWAPlannerROS/theta_max: 1.2
- /move_base/ADDWAPlannerROS/using_kinect: True
- /move_base/ADDWAPlannerROS/using_laserscan: True
- /move_base/ADDWAPlannerROS/vtheta_samples: 20
- /move_base/ADDWAPlannerROS/vx_samples: 20
- /move_base/ADDWAPlannerROS/vy_samples: 1
- /move_base/ADDWAPlannerROS/xy_goal_tolerance: 0.1
- /move_base/ADDWAPlannerROS/yaw_goal_tolerance: 0.1
- /move_base/base_global_planner: navfn/NavfnROS
- /move_base/base_local_planner: addwa_local_plann…
- /move_base/clearing_rotation_allowed: False
- /move_base/controller_frequency: 15.0
- /move_base/global_costmap/global_frame: /map
- /move_base/global_costmap/inflation_radius: 0.55
- /move_base/global_costmap/map_type: costmap
- /move_base/global_costmap/max_obstacle_height: 0.6
- /move_base/global_costmap/min_obstacle_height: 0.0
- /move_base/global_costmap/obstacle_range: 2.5
- /move_base/global_costmap/publish_frequency: 1.0
- /move_base/global_costmap/raytrace_range: 3.0
- /move_base/global_costmap/resolution: 0.1
- /move_base/global_costmap/robot_base_frame: /base_footprint
- /move_base/global_costmap/robot_radius: 0.15
- /move_base/global_costmap/rolling_window: False
- /move_base/global_costmap/static_map: True
- /move_base/global_costmap/transform_tolerance: 1.0
- /move_base/global_costmap/update_frequency: 5.0
- /move_base/latch_xy_goal_tolerance: True
- /move_base/local_costmap/global_frame: /map
- /move_base/local_costmap/height: 5.0
- /move_base/local_costmap/inflation_radius: 0.55
- /move_base/local_costmap/map_type: costmap
- /move_base/local_costmap/max_obstacle_height: 0.6
- /move_base/local_costmap/min_obstacle_height: 0.0
- /move_base/local_costmap/obstacle_range: 2.5
- /move_base/local_costmap/publish_frequency: 1.0
- /move_base/local_costmap/raytrace_range: 3.0
- /move_base/local_costmap/resolution: 0.1
- /move_base/local_costmap/robot_base_frame: /base_footprint
- /move_base/local_costmap/robot_radius: 0.15
- /move_base/local_costmap/rolling_window: False
- /move_base/local_costmap/static_map: True
- /move_base/local_costmap/transform_tolerance: 1.0
- /move_base/local_costmap/update_frequency: 1.0
- /move_base/local_costmap/width: 5.0
- /move_base/recovery_behavior_enabled: False
- /rosdistro: kinetic
- /rosversion: 1.12.17
NODES
/
map_server (map_server/map_server)
move_base (move_base/move_base)
odom_map_broadcaster (tf/static_transform_publisher)
-
RE: 如何在重装系统后恢复xiaoqiang设置发布在 产品服务
@weijiz 在执行bwupdate xq4的时候出现以下问题怎么解决
Installing python dependencies of xiaoqiang_tts
/home/xiaoqiang/Documents/ros/src/xiaoqiang_tts/venv/bin/pip /home/xiaoqiang/Documents/ros/src/xiaoqiang_tts/requirements.txt
CMake Error at xiaoqiang_tts/CMakeLists.txt:31 (message):
Install python dependencies failed– Configuring incomplete, errors occurred!
See also “/home/xiaoqiang/Documents/ros/build/CMakeFiles/CMakeOutput.log”.
See also “/home/xiaoqiang/Documents/ros/build/CMakeFiles/CMakeError.log”.
Invoking “cmake” failed
编译失败,请检查后重新编译
 可以成功跑完正方形,但是一旦成功到达原点后就会报错
可以成功跑完正方形,但是一旦成功到达原点后就会报错