Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
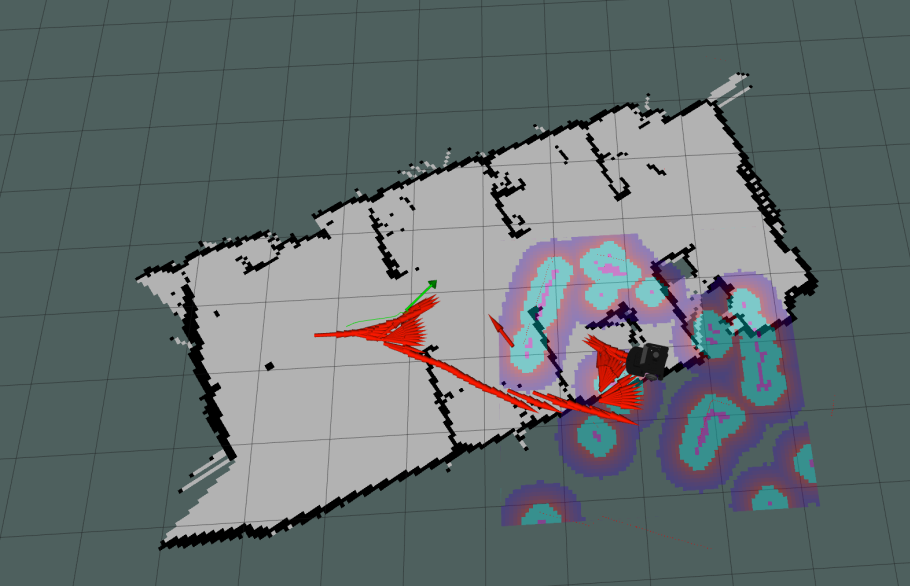
AMCL 导航测试时发生漂移 定位不准问题 开始导航前已使用使用2D Pose Estimation进行位置校准。 导航过程中 扫描的障碍物杂乱 定位不准确 行驶过程中发生漂移现象
小强五代机器人 在进行AMCL导航测试时 发生漂移,定位不准确现象如何解决