2019年仓储AGV(Automated Guided Vehicle,简称AGV)企业开发的热点是从“货架到人”到“货箱到人”,2020年受全国疫情影响,又催生企业开发出医用物流AGV等新兴应用领域。不过,AGV行业如何变化和升级,都离不开“避障”这一门小而精的课题。

图1 仓储AGV图片
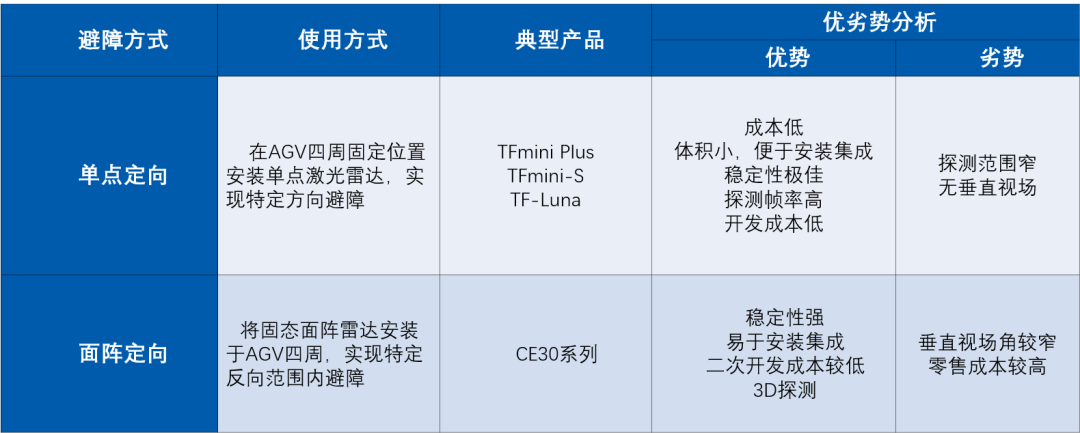
01 激光雷达在AGV应用的避障方法
市场上关于AGV避障的方法多种多样,各有优劣。本文主要介绍北醒激光雷达应用于AGV避障的两种主要方法:单点定向避障和固态3D面阵定向避障两种。
点击查看大图
单点定向避障
北醒TF系列单点激光雷达避障模块是基于ToF(Time of Flight时间飞行原理)的激光测距技术,用于0.1m-12m近距离的障碍物探测与避障功能。原理和使用方法都比较简单,雷达输出最近障碍物的距离值,从而指导系统进行刹车或减速的指令,是移动机器人/AGV近距离低矮障碍物探测的低成本首选可靠方案。
主要特点如下
测量精度高,感知稳定
视场角小,准直度好,避免误触发
100-1000Hz数据刷新率,灵敏避障
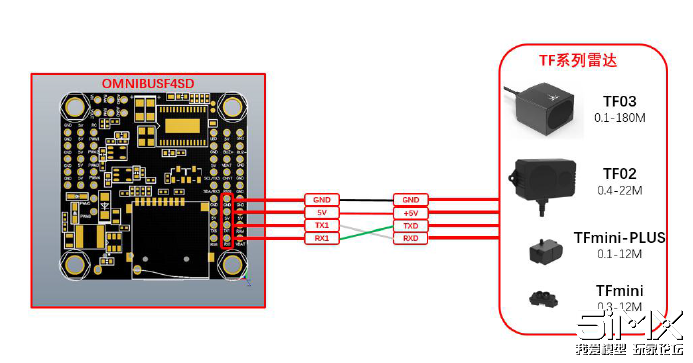
多通讯接口可选,即插即用
耗电量极低,重量轻,易集成
不产生回波干扰、地面不平等误报现象
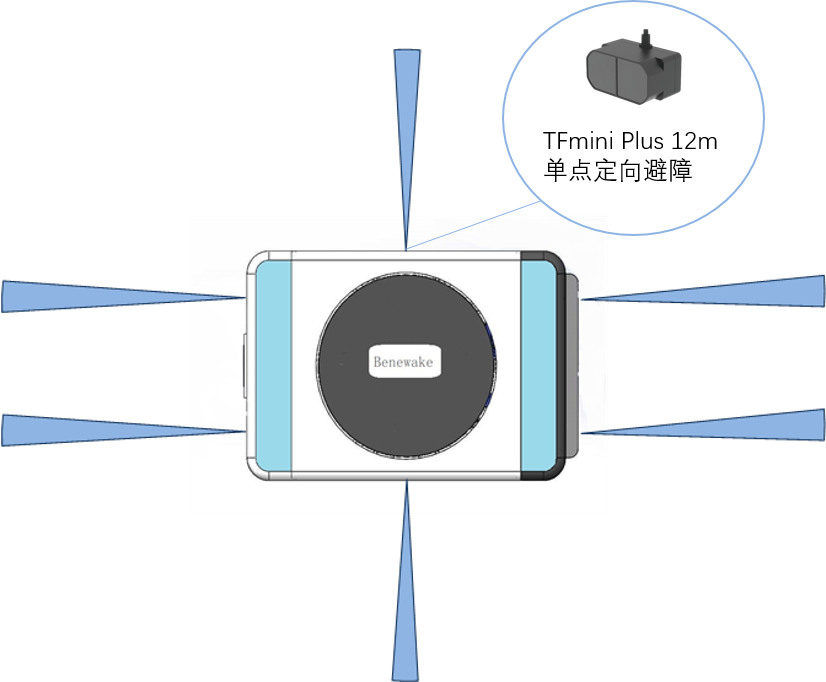
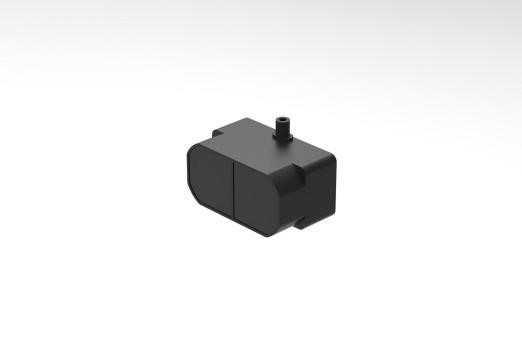
图2 单点定向避障激光雷达示意图
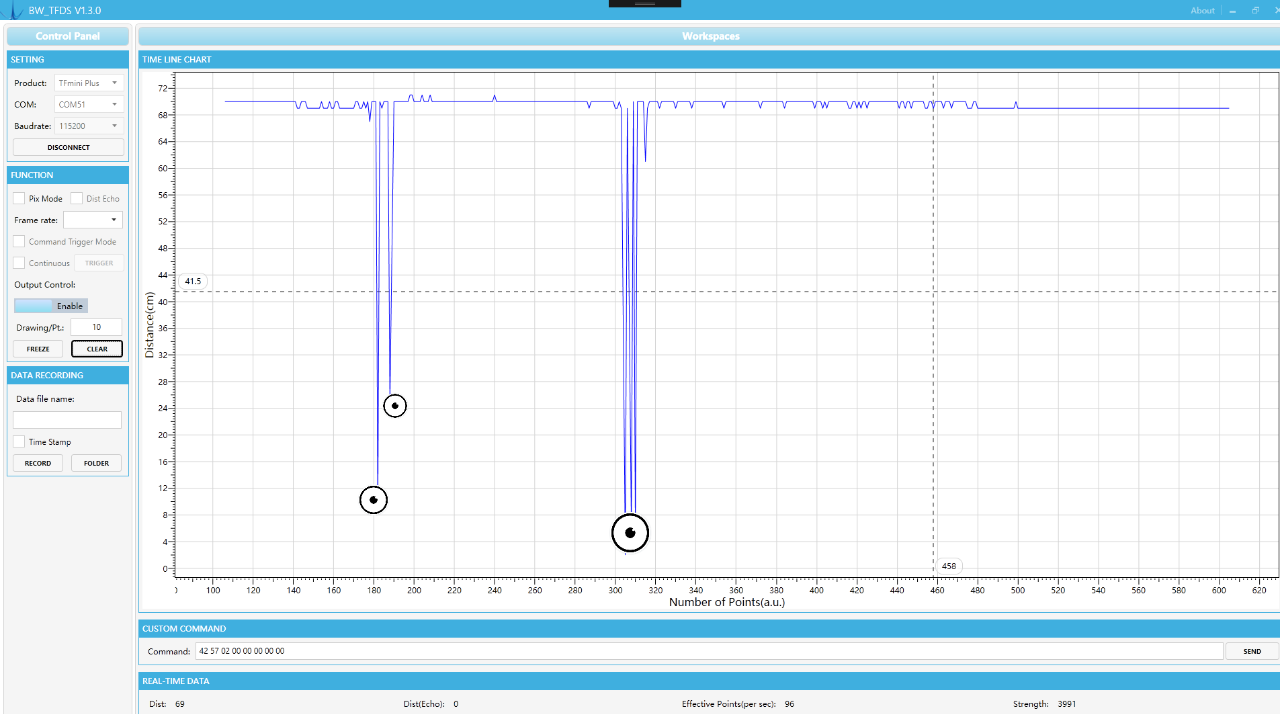
图3 上位机测距显示图(圆圈处有障碍物)
固态3D面阵定向避障
北醒CE30 3D面阵固态激光雷达也是一种定向避障方式,不同于单线及多线扫描避障方式。我们熟知的单线和多线旋转雷达均安装于AGV顶端,实现360°或特定角度避障,而CE30通过发射一束椭圆锥形光束,探测出固定视线范围内的障碍物信息,是低矮水平面且固定路径导航AGV避障的首选低成本方案。
主要特点如下
1°角分辨率高,精确识别障碍物位置
自定义避障模式和二次开发避障模式可选
20Hz初始探测频率,避障响应更快
小体积,自带安装孔,可直接嵌入机器
内部无旋转部件,结构可靠稳定性一致
不产生回波干扰、地面不平等误报现象
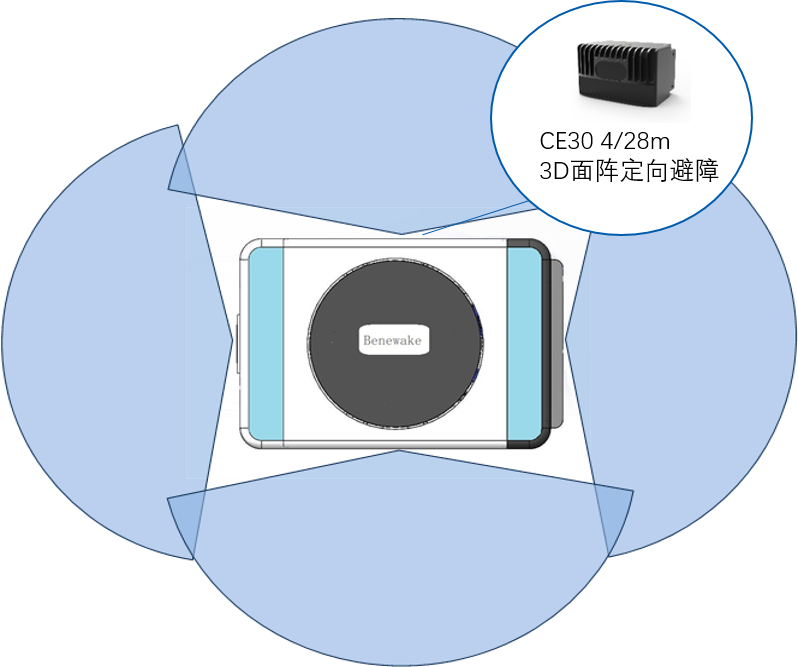
图4 3D面阵定向避障激光雷达示意图
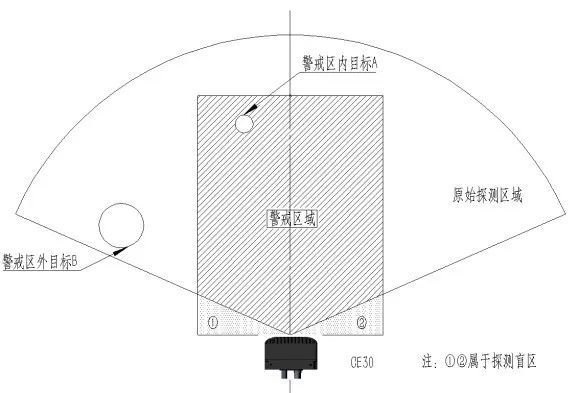
图5 自定义避障模式示意图(图中矩形区域)
自定义避障模式是专门为AGV避障应用开发的模式。如图5所示,该模式下,CE30 将会为AGV筛选出最关键的避障目标,也就是警戒区内目标A,将此目标的距离信息提供给AGV。可根据客户需求定制避障区域。
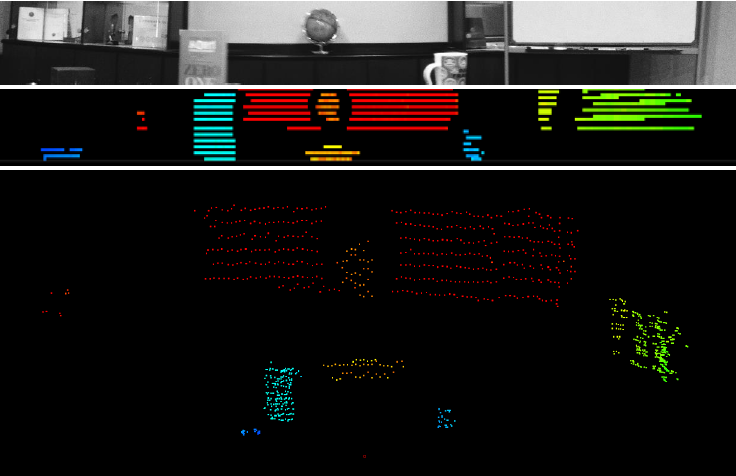
图6 二次开发避障模式(实际场景图(上)和雷达拍摄的深度图(中)及点云图(下)对比)
二次开发避障模式是为AGV提供障碍物的点云图,以此“描绘”出障碍物的大致轮廓。在预设情况下,CE30会输出一幅深度图和与之对应的每一个像素信号强度数据。深度图中每个像素的深度值表示该像素对应探测点到雷达前表面的投影距离。如图6所示,分别展示了普通灰度相机拍摄的实际场景图(上)、 同一位置 CE30拍摄的深度图(中)和根据深度数据绘制的点云图(下,从略高于 CE30位置观察)。
02 激光雷达在AGV及仓储应用案例
仓储AGV避障
将一个CE30激光雷达安装在仓储AGV的正前方,实时监测前方障碍物,控制AGV减速或刹车,辅助其快速存取货、智能搬运等功能。

方案优势:支持多机协作,可抗仓库中环境光的干扰,结构不易损坏,可靠稳定。
仓储叉车避障
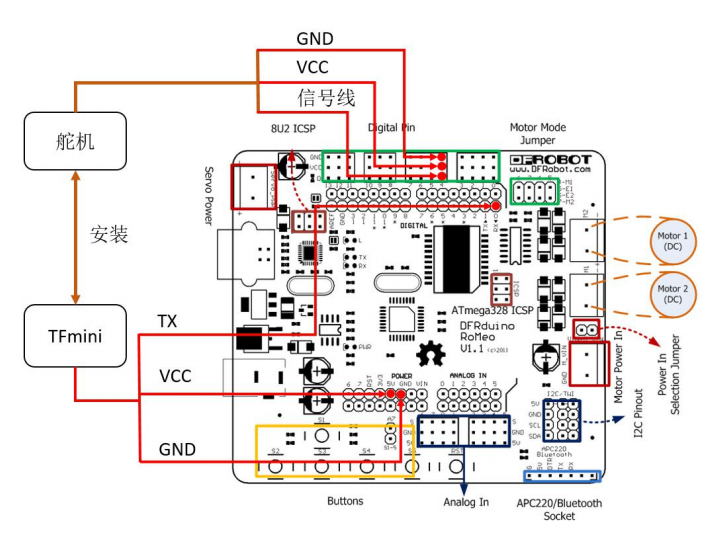
将TFmini-Plus安装在叉车叉脚正前方,识别前方障碍物距离信息反馈给叉车,叉车系统进行处理后,进行防撞或辅助定位托盘位置。
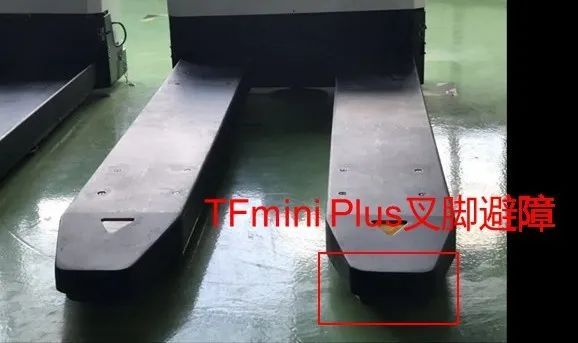
方案优势:工控行业深耕时间长,针对客户非标定制,匹配度高,在低成本避障方向,性价比高。
立体仓库避障
将两个TFmini Plus分别安装在智能穿梭车的前后方,实时监测前后方障碍物及距离信息,控制小车减速或急停,从而实现存取货、搬运、避障等功能。
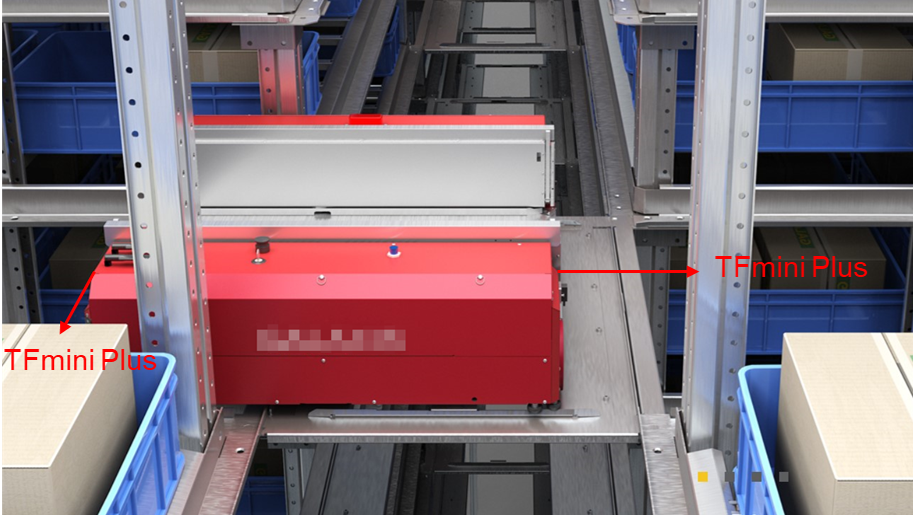
方案优势:可直接安装在小车上,安装便捷,快速调试,性价比高,避障精准。























") {
{