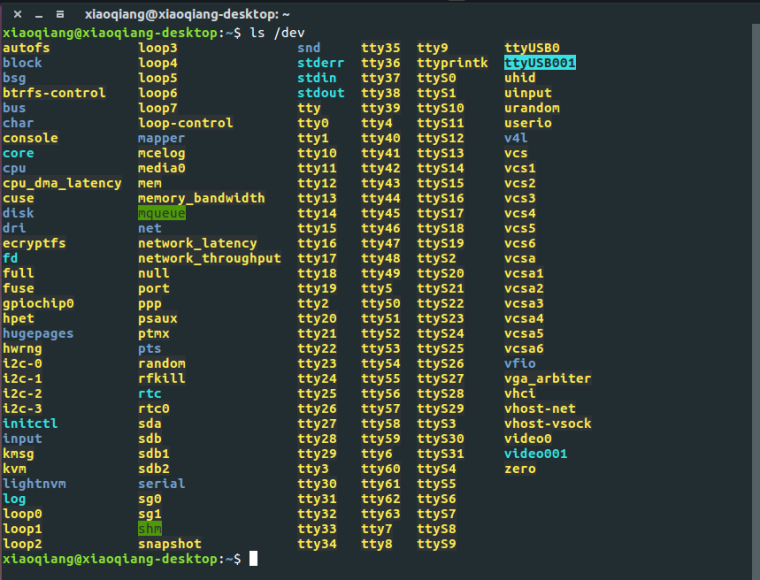
没有ttyUSB002, 我们用的是XQ-4 Pro的小车。这个不是带有雷达吗?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ccsky 发布的最新帖子
-
RE: xiaoqiang tutorial (14) using rplidar A2 with gmapping发布在 产品服务

-
RE: xiaoqiang tutorial (14) using rplidar A2 with gmapping发布在 产品服务
@weijiz 在 xiaoqiang tutorial (14) using rplidar A2 with gmapping 中说:
am_gmapping_xiaoqiang_rplida
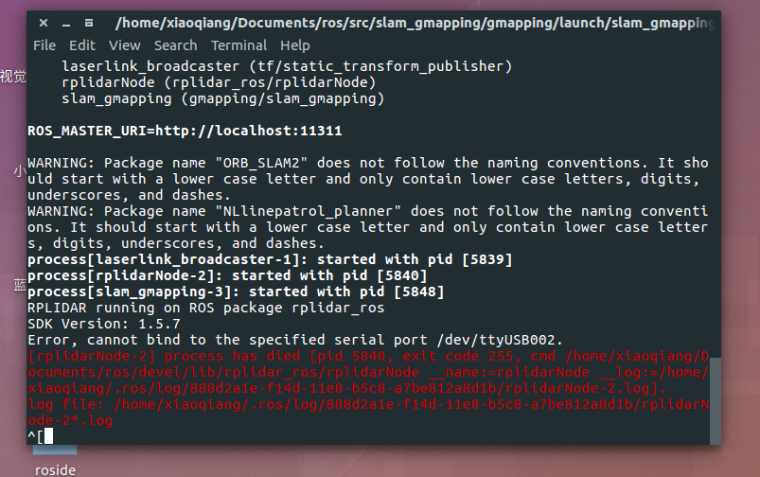
启动roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launch 时报错,是什么原因呢? 会不会影响在rviz中构建地图?