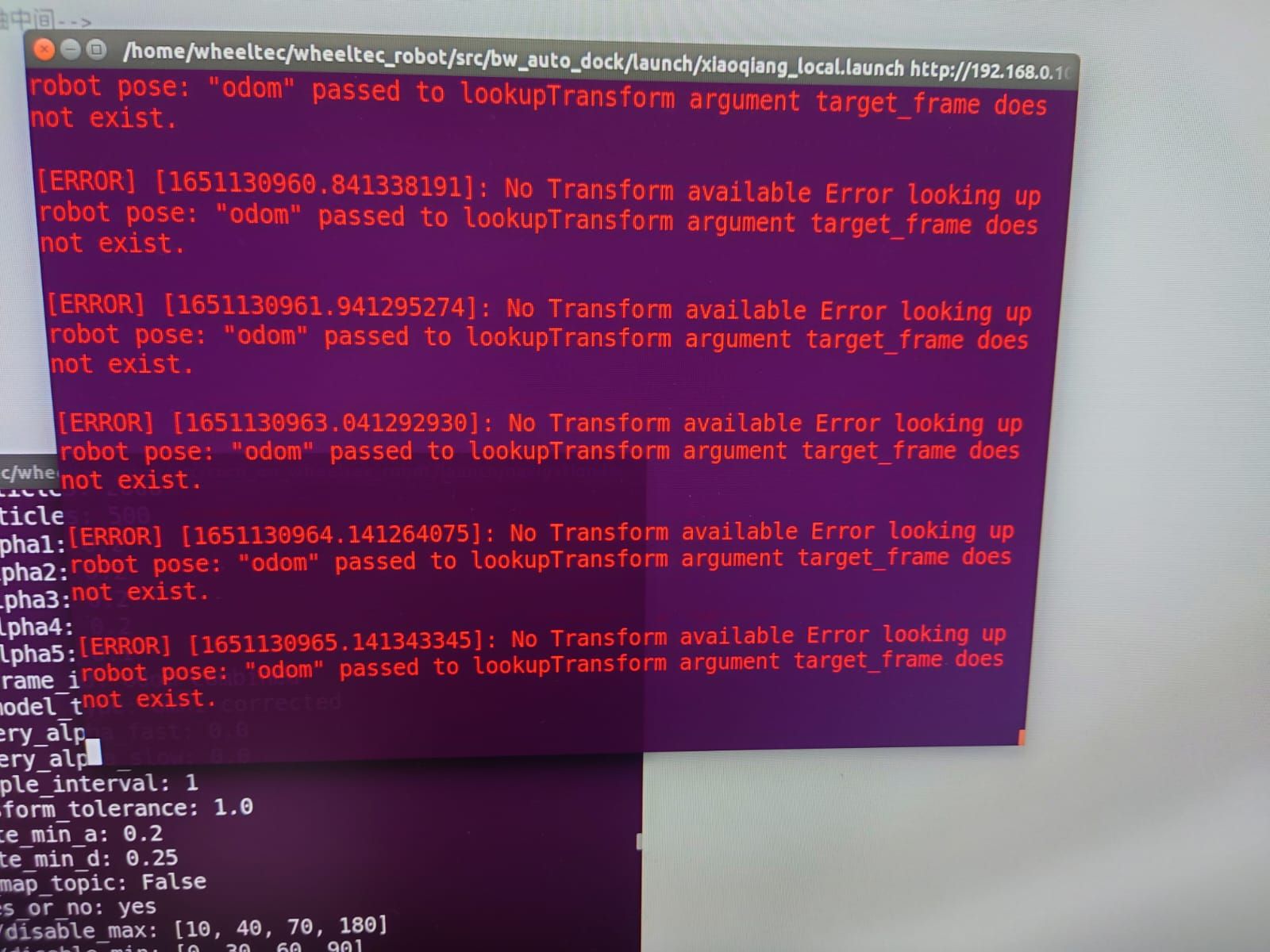
@xiaoqiang 謝謝. 改了launch file內的param name=“global_frame_id” value=“odom_combined” 就沒有error和rostopic echo IRSensor1 有數據回 但dockposition 生成不到file.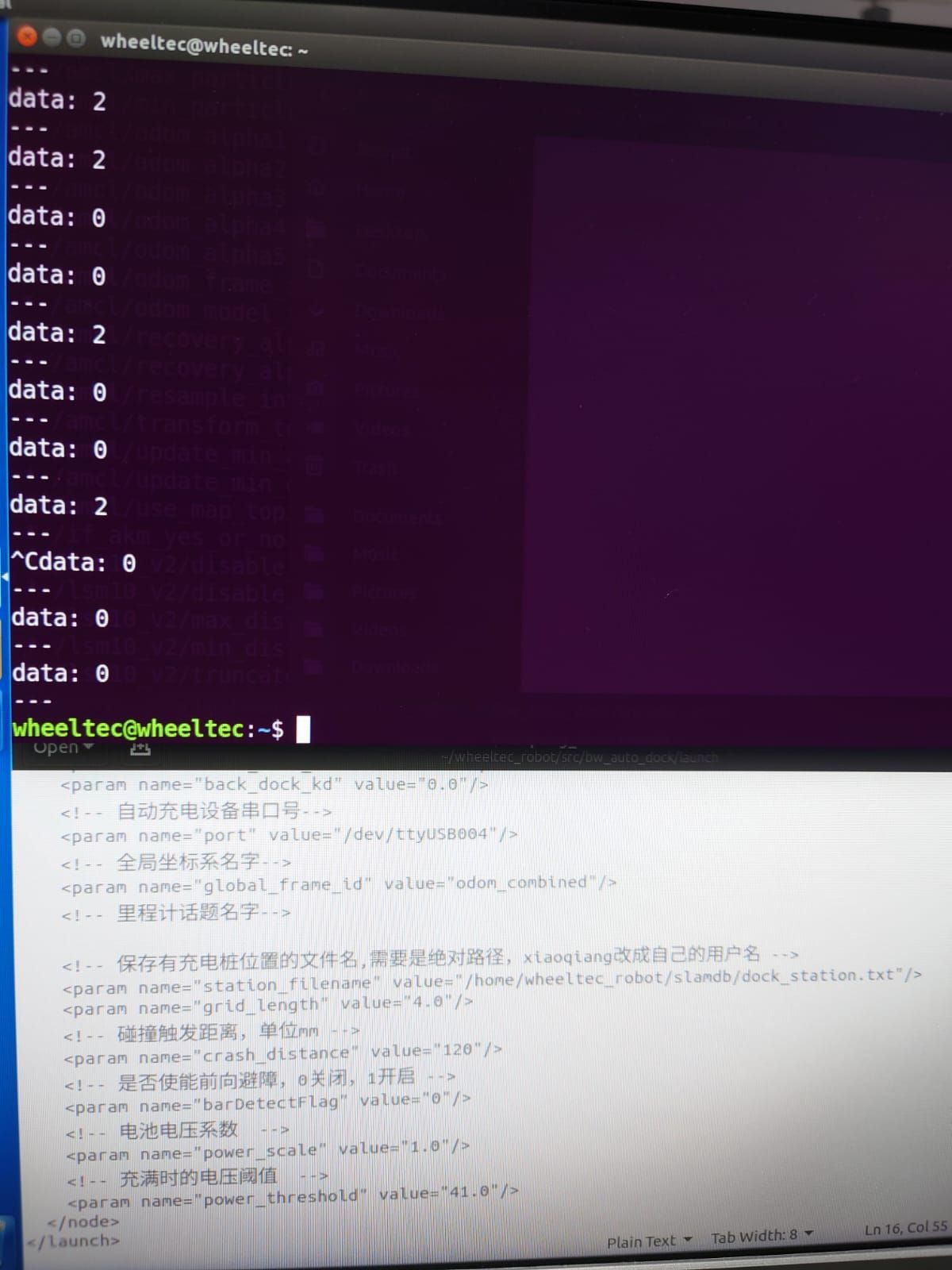
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
dennis 发布的帖子
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务

-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
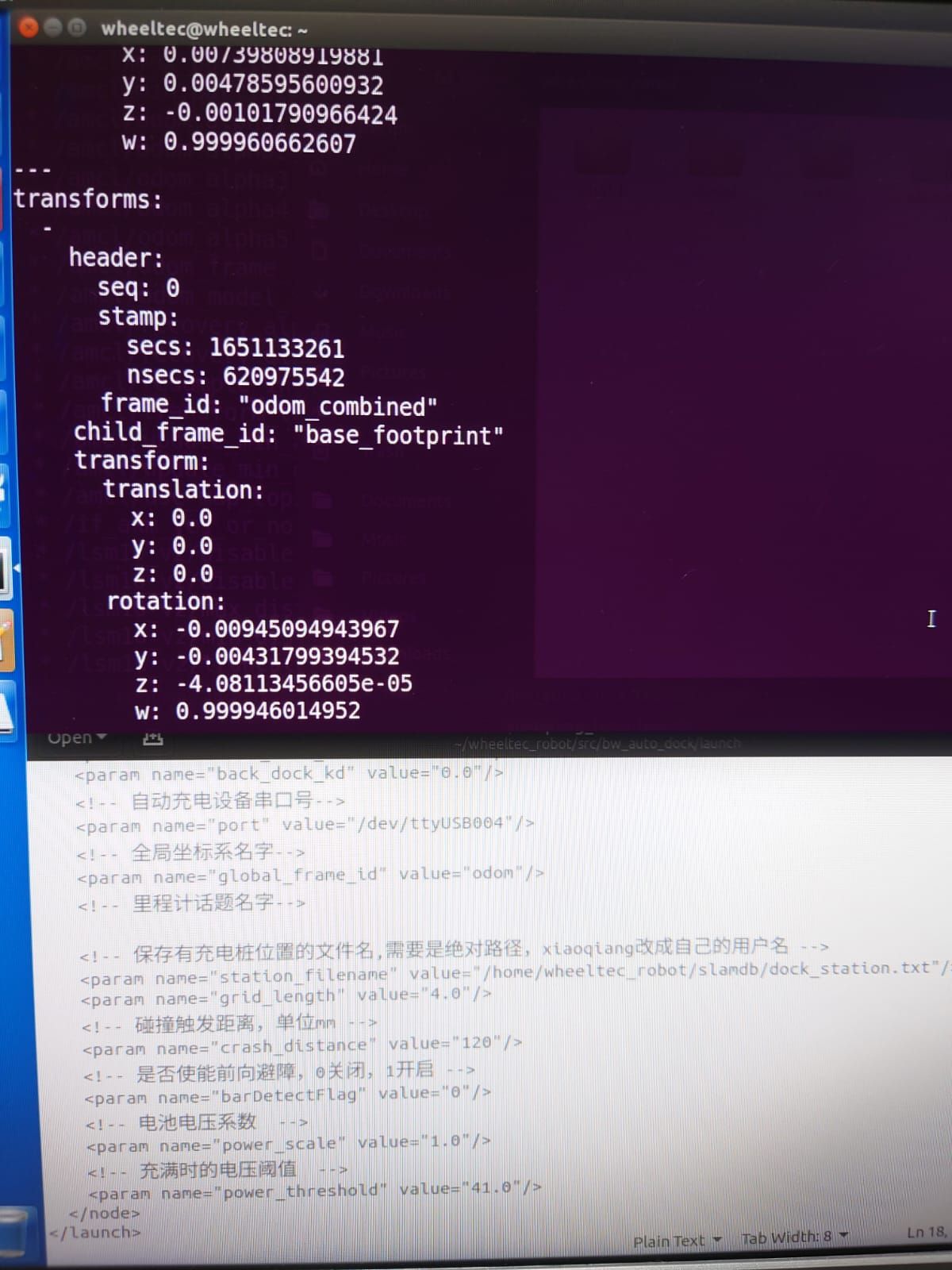
@xiaoqiang 我用rostopic echo /tf 看到有數據 下面是我的launch file 是不是還有其他問題 謝謝
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
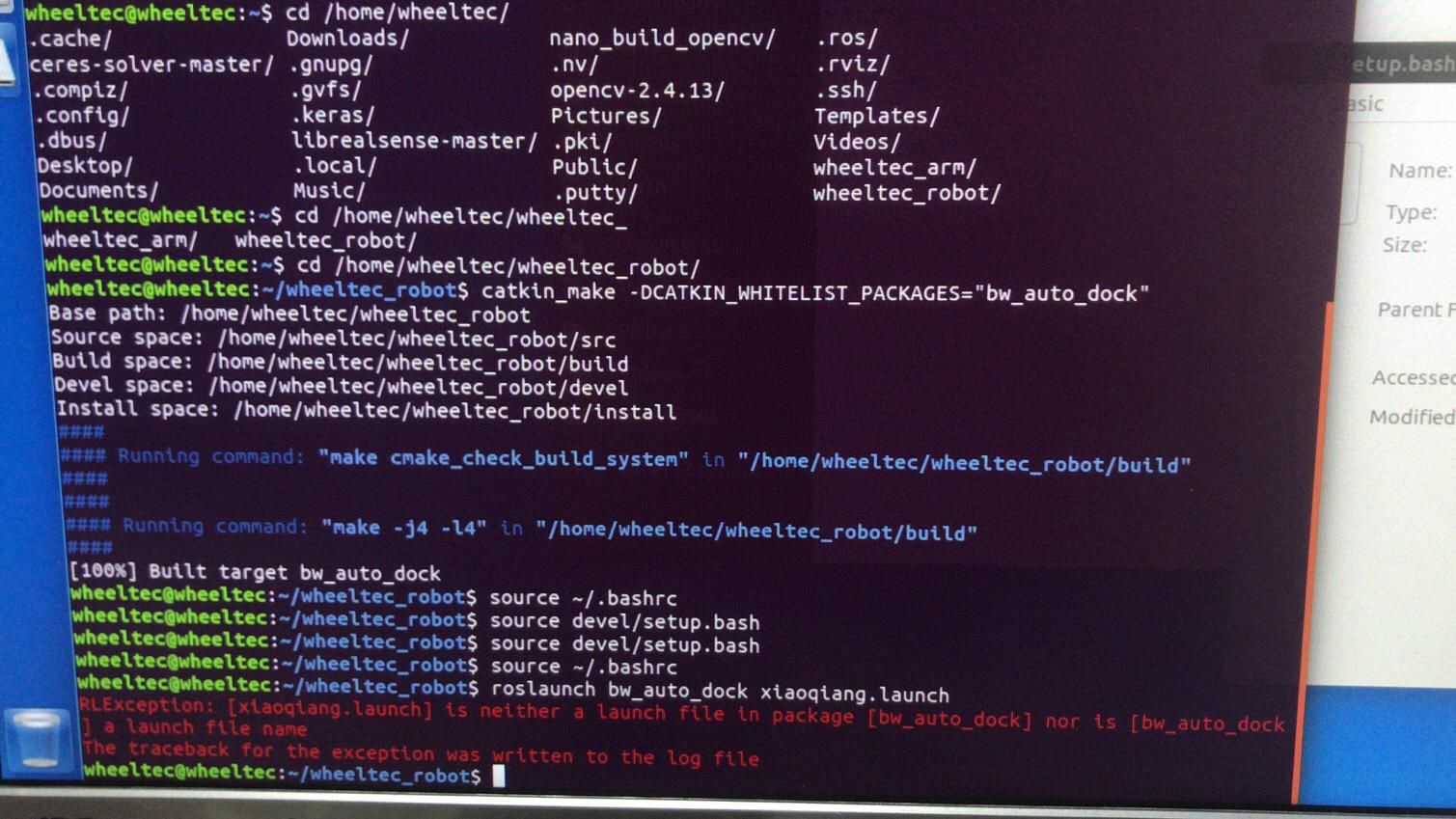
Jetson Nano上的ubuntu 編譯成功但roslaunch失敗 是什麼原因