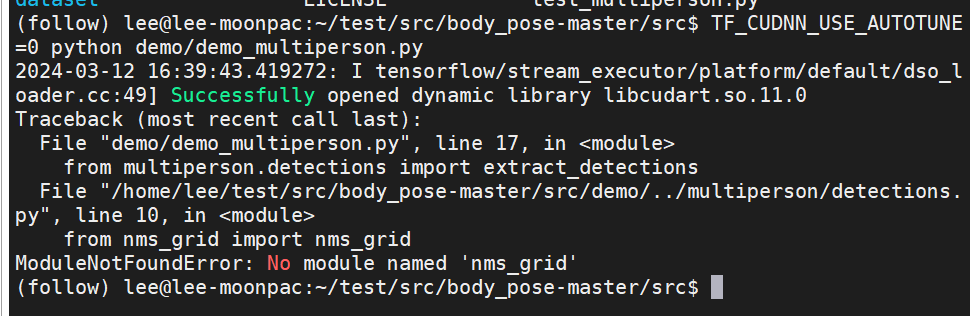
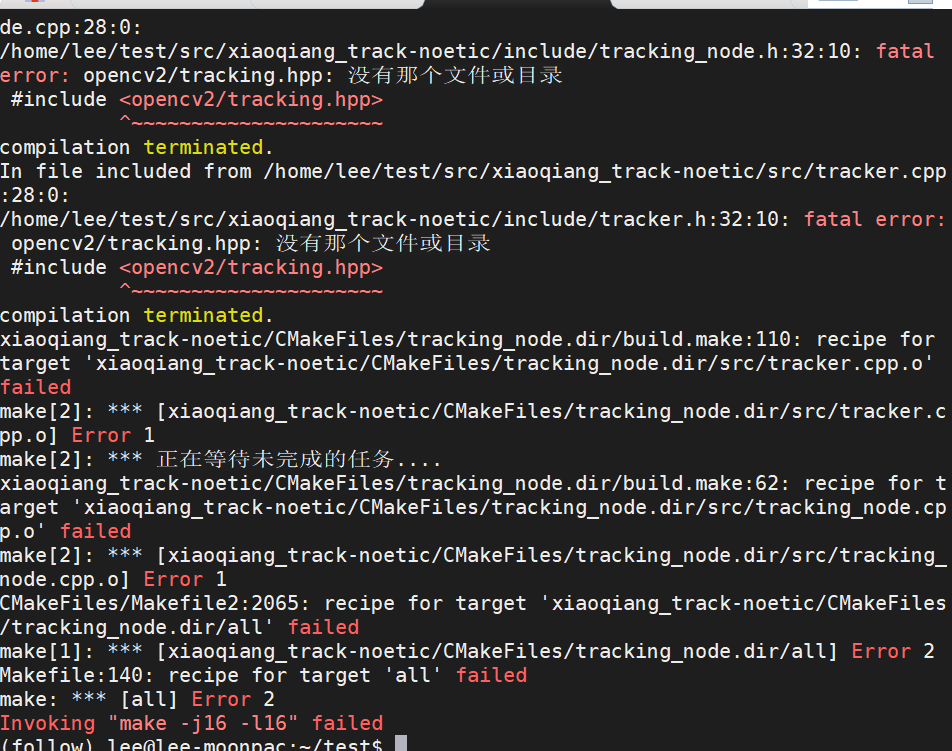
 body_pose在运行多人检测时出现这样的错误,没找到cpython编译文件
body_pose在运行多人检测时出现这样的错误,没找到cpython编译文件
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
huapiaoxiang21 发布的帖子
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
博主,您好,我在ubuntu18.04上编译xiaoqiang_tracker这个包出现错误,使用conda建立resquestments所需的环境 -
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
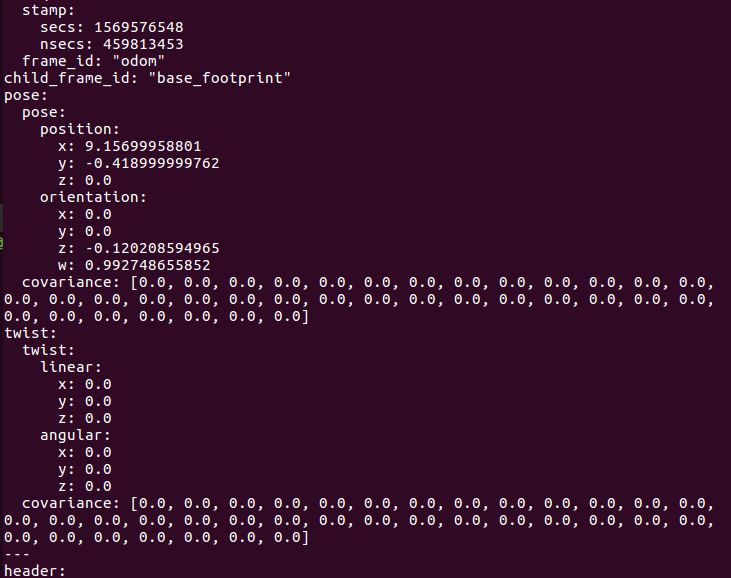
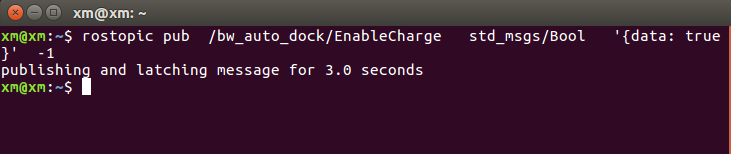
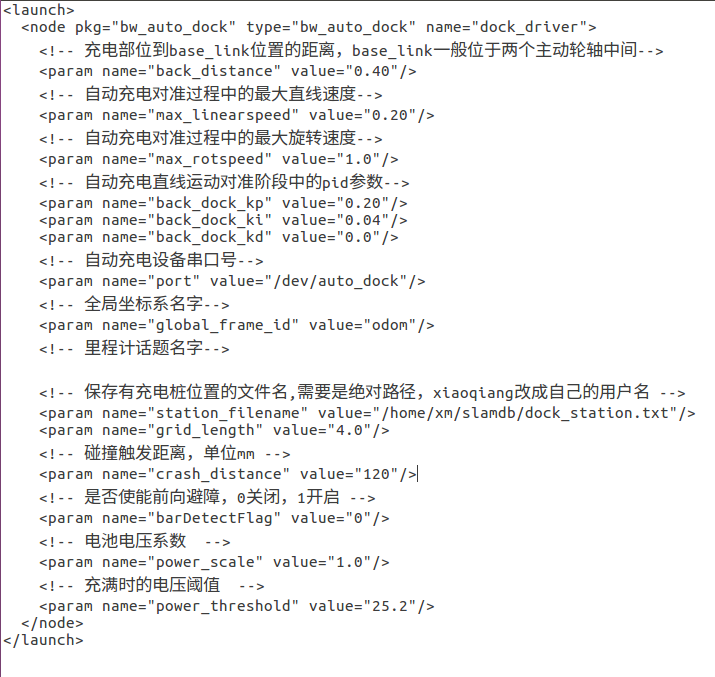
你好,我们是非小强用户,想入手一套充电桩和充电模块,有几个问题想请问你们:1.充电模块可以检测电池电压或者电量吗,还是说需要我们自己发布电池电量?
2.当电量低于百分之20的时候,这个阈值在哪里改? -
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
你好 这里有几个问题向请教下,1.非小强用户使用这个充电桩和充电模块的话,需要在哪里发布电池电量的信息?2.知道充电桩的位置后,如何计算两个参考点的位置。
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
你好 还是这个错误 ERROR: cannot launch node of type [audio_capture/audio_capture]: can’t locate node [audio_capture] in package [audio_capture]
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
from xiaoqiang_track.msg import TrackTarget
ImportError: No module named xiaoqiang_track.msg