@xiaoqiang when /cmd_vel = 0 BW-DR03 will short circuit, right?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
jarubank 发布的最新帖子
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务

-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@xiaoqiang BW-DR03 can break by electric break?
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
“Error: TF_NAN_INPUT: Ignoring transform for child_frame_id “base_footprint” from authority “/motor_driver””
how to solve?
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
above picture is true value of my car. I use Zltech hub motor 13 inch
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
Thank you!!
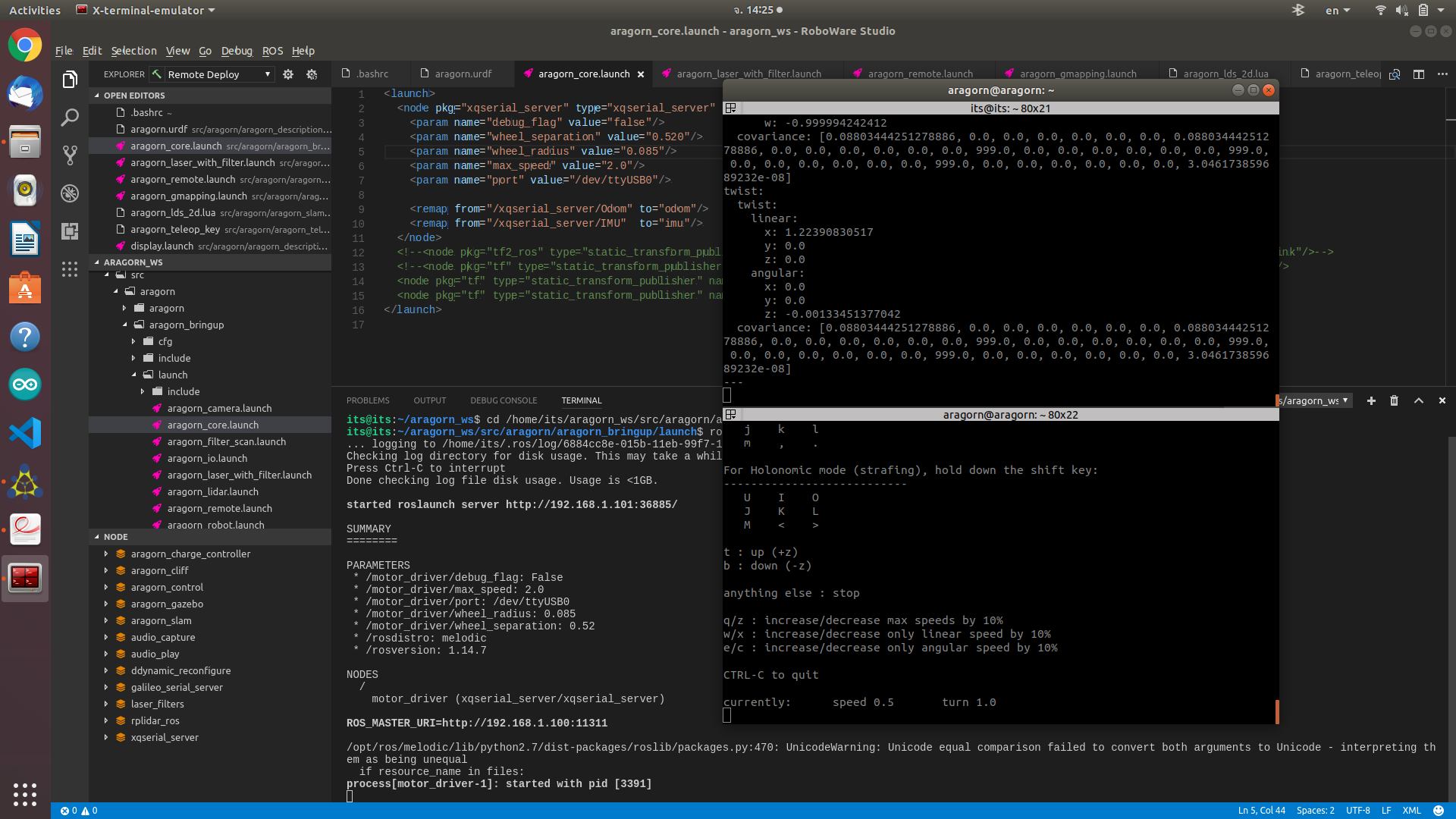
I have new problem when I publish cmd_vel 0.5m/s but /xqserial_server/Odom has 1.2m/s how to solve this?
-
BW-DR03 with ROS wrong direction control发布在 产品服务
Hi I’m Jaruwat form Thailand
I use BW-DR03 on Ubuntu ROS Melodic, pkg xqserial_server branches Lungu, connect with hub motor with True left wheel Ma1 H0 and right wheel Mb1 H1
I used Mtools for test BW-DR03 when I test on Open loop speed control mode positive PWM motor direction clockwise and PWM negative counterclockwise boths direction smooth
but when I connect BW-DR03 with ROS when I pub angular velocity robot direction is wrong such as positive angular velocity robot direction clockwise and negative angular velocity robot direction counterclockwise (no problem with linear velocity) how to solve this problem?
Thank you
