你好我安装了Kinect版本 但是无法进行SSH操作 请问是“没有则把U转串换一个USB接口,直到出现为止”这句话具体是什么意思
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
qq303956 发布的最新帖子
-
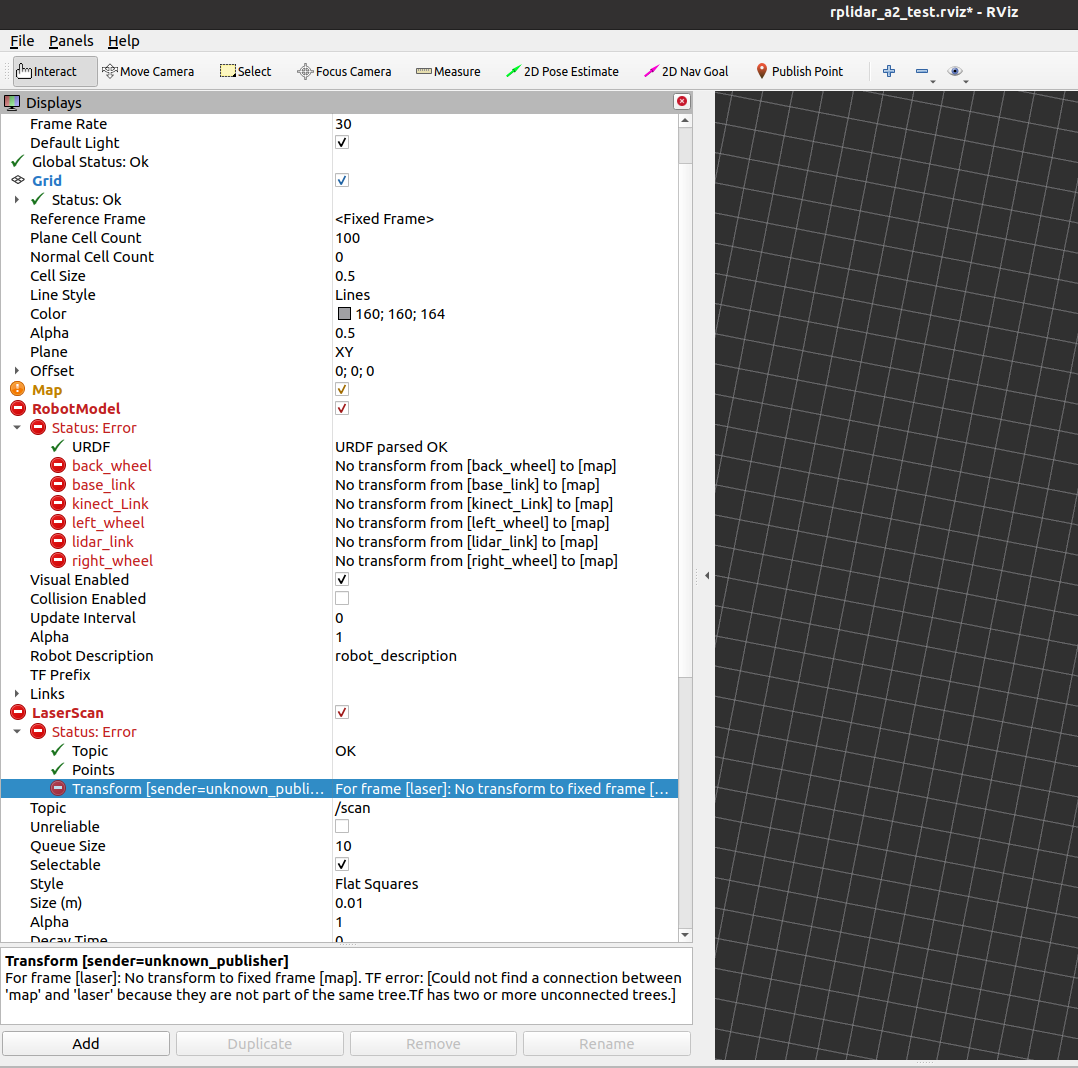
RE: xiaoqiang tutorial (14) using rplidar A2 with gmapping发布在 产品服务
您好RVIZ最后出现这种情况怎么处理呢 可以说稍微详细一些嘛 谢谢了

-
RE: 小强ROS机器人教程(8)___kinect1代 ROS驱动测试与安装发布在 产品服务
不好意思 初学者
出现这种情况怎么处理呢
For frame [kinect_link_new]: Frame [kinect_link_new] does not exist