@MUZUIXIAOHAI 你好,请问你对于这里的3D定位导航确定了一个框架了吗?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
wjjjjyourFA 发布的最新帖子
-
为什么gazebo仿真中多线激光IMU采用Cartographer建图没有白色区域发布在 激光雷达
参照Cartographer教程对3D.lua与launch文件等做出相应修改后,在仿真环境下运行SLAM建图,发现可以画出黑色区域即障碍物,其余显示为灰色未知区域,无法的到相应的白色已知区域。
对数据集分别测试:
2D单线激光,有白色区域
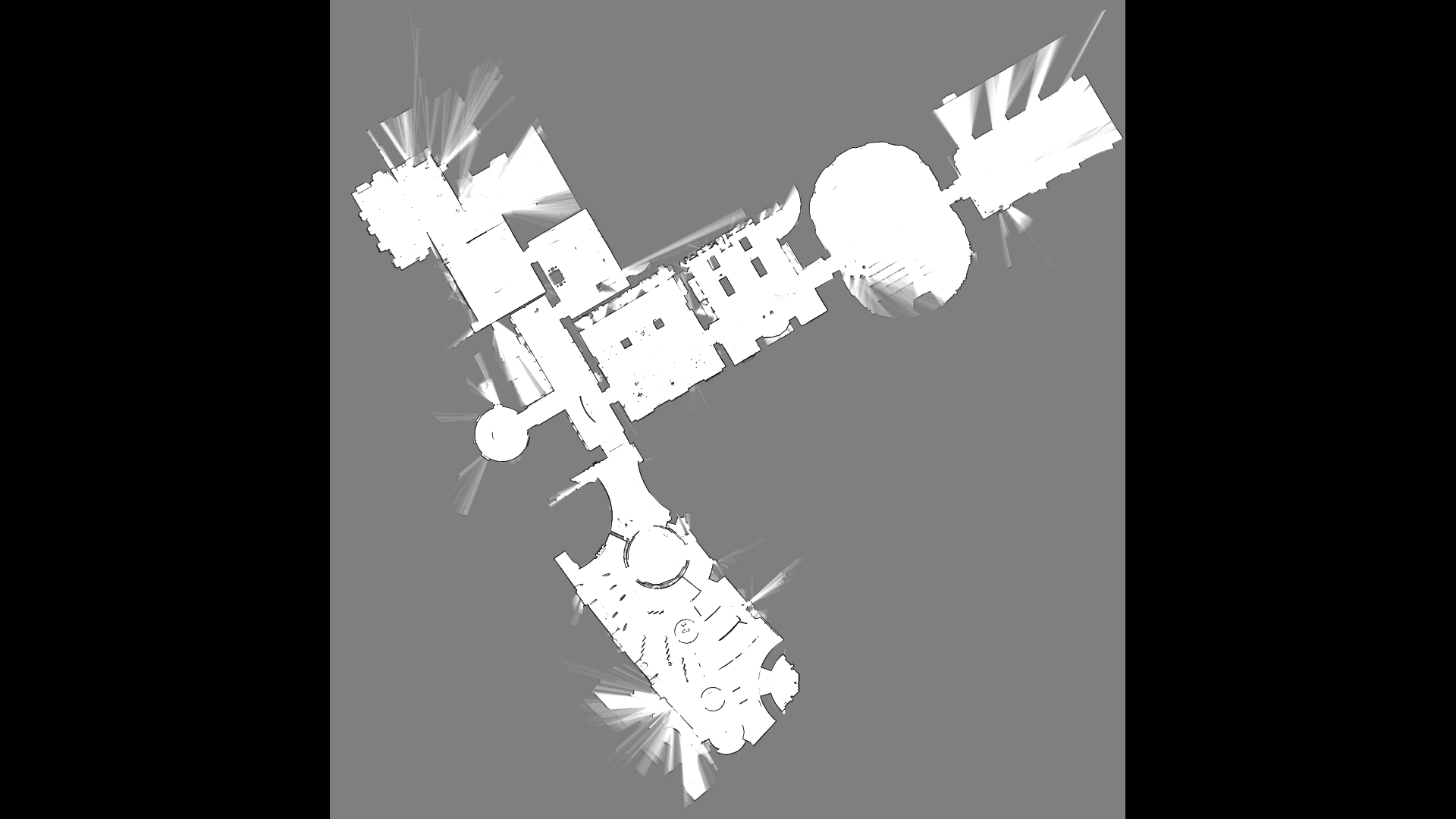
3D两多线激光-博物馆数据集,有白色区域,ps:白色与灰色互相掺杂
3D一多线激光-同一博物馆数据集,屏蔽垂直激光,有白色区域,但白色区域面积明显减少,灰色占据主导。
2D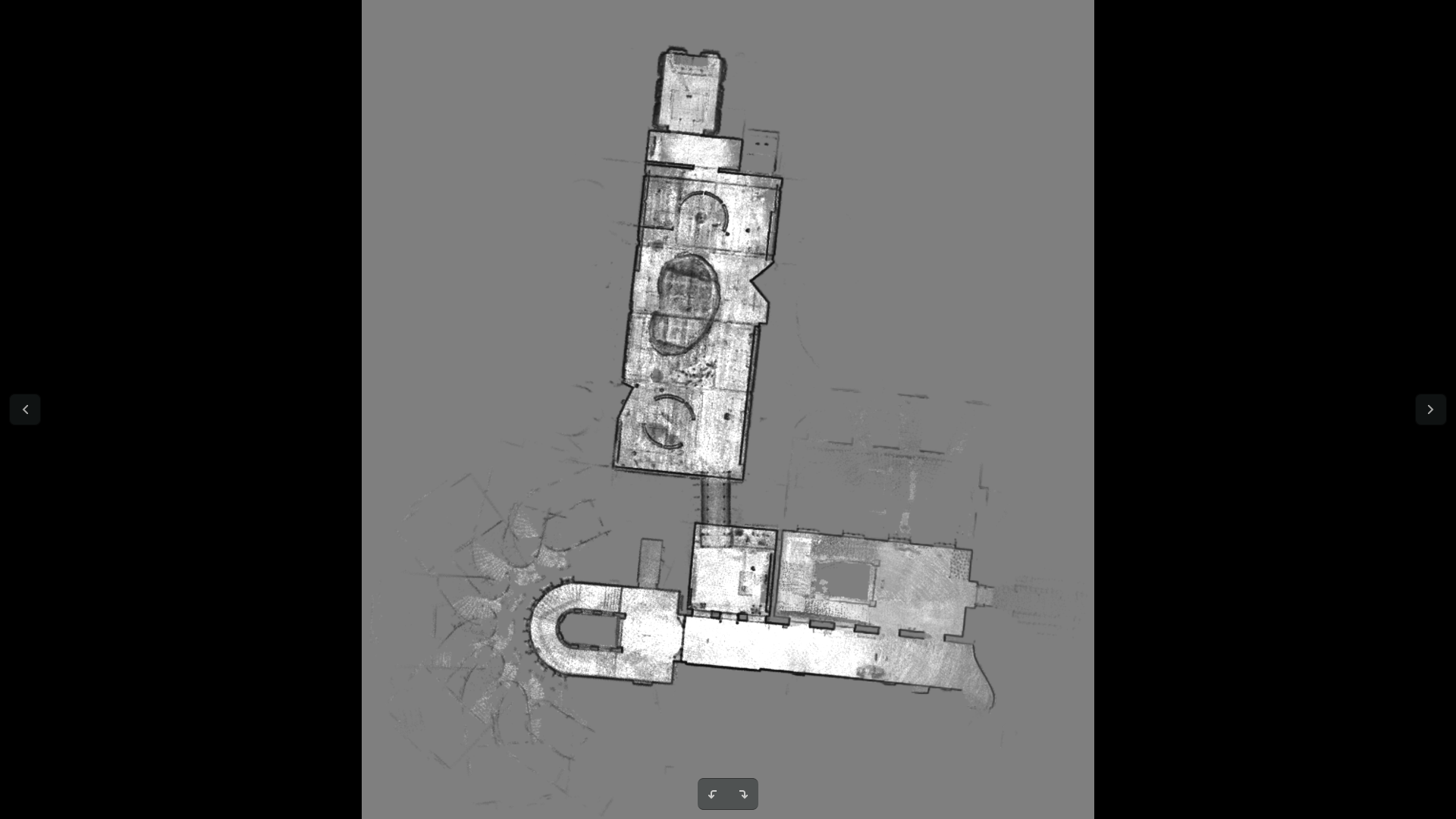
3D2
3D1因此怀疑实时仿真中无白色区域的原因是,GAZEBO仿真中,对于多线激光雷达的采样点设置过少,由于设备限制我这里只能设置在7000以下
/scan>
/horizontal>
/samples>7000/samples>
麻烦有过同样状况的大佬帮帮忙解答一下。