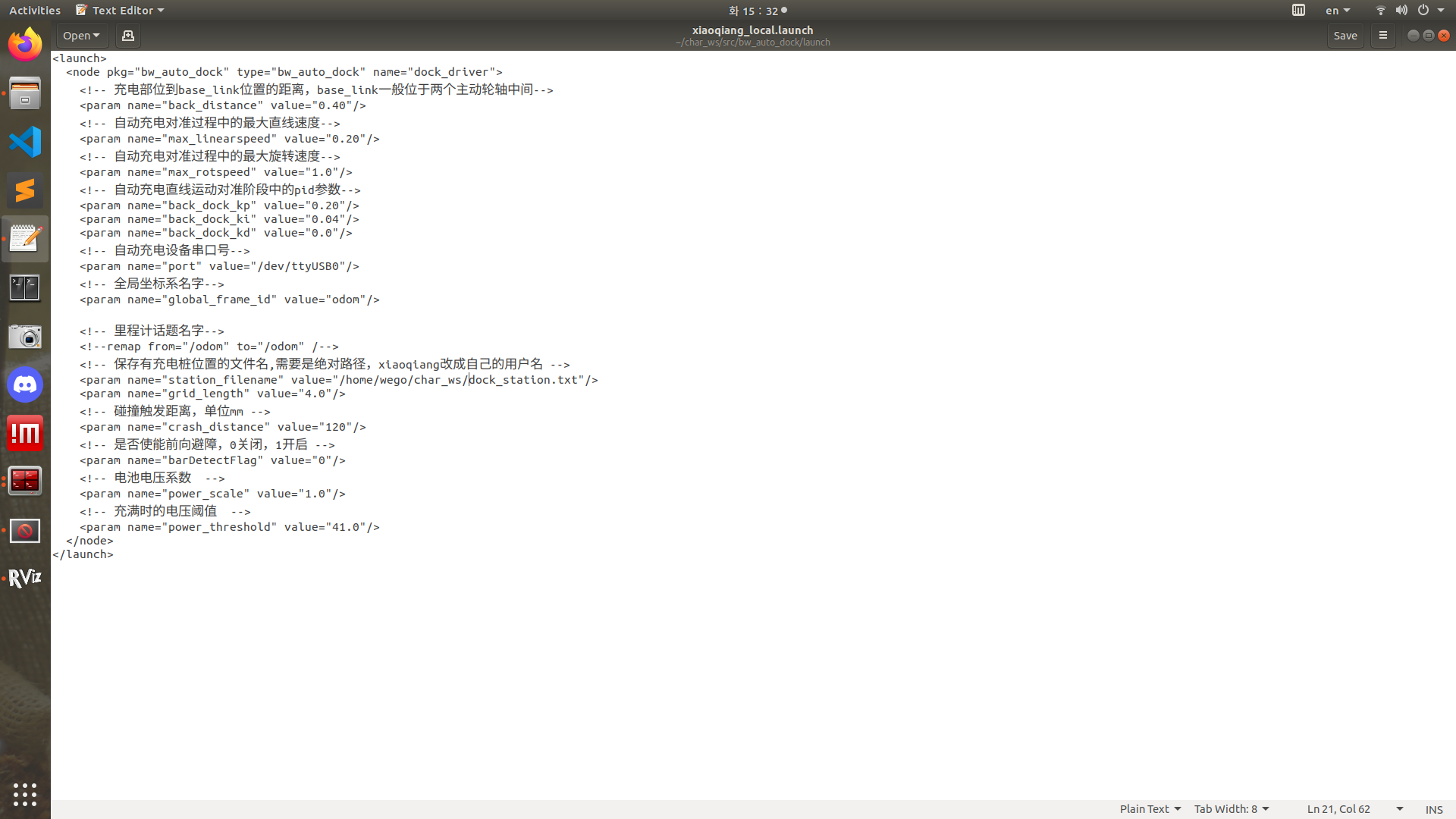
@小助理 launch文件代码:
<!-- 里程计话题名字-->
<!--remap from="/odom" to="/odom" /-->
<!-- 保存有充电桩位置的文件名,需要是绝对路径,xiaoqiang改成自己的用户名 -->
<param name="station_filename" value="/home/wego/char_ws/dock_station.txt"/>
<param name="grid_length" value="4.0"/>
<!-- 碰撞触发距离,单位mm -->
<param name="crash_distance" value="120"/>
<!-- 是否使能前向避障,0关闭,1开启 -->
<param name="barDetectFlag" value="0"/>
<!-- 电池电压系数 -->
<param name="power_scale" value="1.0"/>
<!-- 充满时的电压阈值 -->
<param name="power_threshold" value="41.0"/>