ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
罕见bug解决办法: kienct 1代运行错误Failed to claim camera interface: LIBUSB_ERROR_NOT_FOUND
-
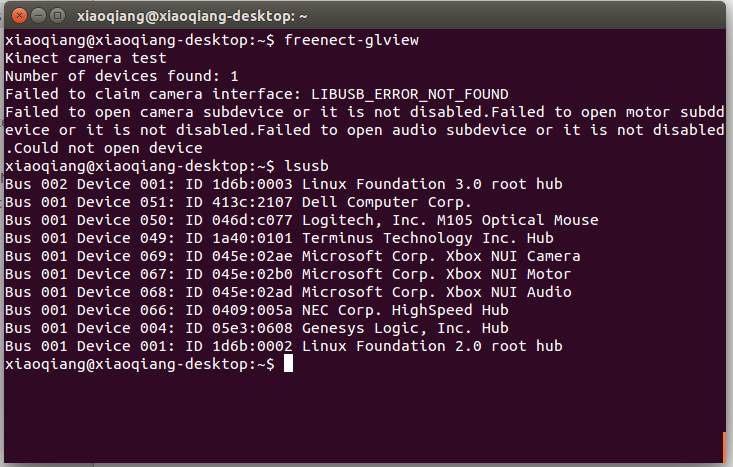
安装完kienct 1代驱动后(驱动安装教程),运行freenect-glview测试设备时,如果出现Failed to claim camera interface: LIBUSB_ERROR_NOT_FOUND的错误,但是lsusb却能找到kienct,错误输出类似下图
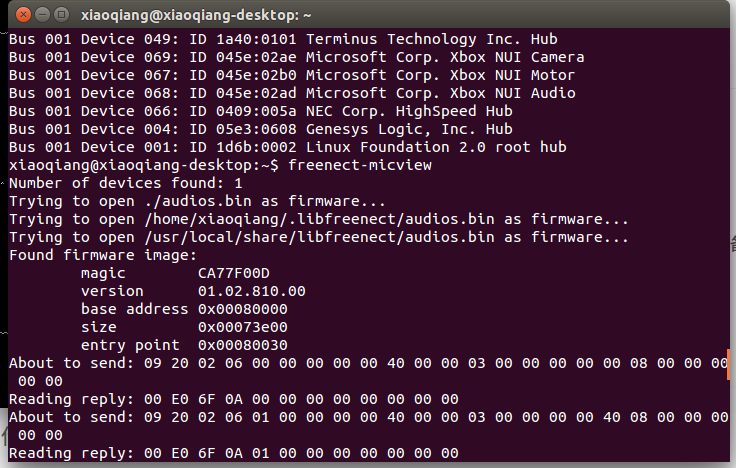
此时先判断是不是驱动安装失败,运行freenect-micview,如果出现类似下图的正确结果
这种情况下,很有可能是因为其它usb设备(我遇到的是鼠标和键盘)和kienct冲突了。
在ubuntu系统下鼠标和键盘等hid设备使用的是内核驱动,而libfreenect使用的是libusb,当这两种设备都插在同一个usb控制器上时,驱动可能会引发冲突导致其中一种设备失效。例如先插入鼠标,后插入kinect,则鼠标工作正常但是kinect无法正常工作;如果先插入kienct,后插入鼠标,则会发现鼠标失灵。
解决办法:电脑主机的usb口都是分组配置的,即多条总线分别对应多个usb口,例如主机前面板的几个usb口对应1条总线,后面板上的几个usb口对应另一条总线。将kienct和其他usb设备,分别插在不同总线的usb口上就能解决上面的问题。
对于小强pro:主机4个黑色usb2.0口对应1条总线,4个蓝色usb3.0口分别对应4条总线,因此推荐将kienct插在任意的一个usb3.0口,这样其他usb设备可以在剩余usb口中任意选择
对于小强mini:主机从sw开关数起,分布有1个usb3.0,两组usb2.0,其中usb2.0每组上下两个,因此推荐将keinct单独插在中间那组usb2.0口上,右侧那组usb2.0分别插入usb摄像头和u转串,usb3.0口用来外接一个usb hub,鼠标键盘之类全部插在这个hub上即可,usb3.0带宽较高适合用hub扩展。 -
我的是小强mini,重新安装的新的镜像。应该系统之中有Kinect的驱动。我之前有几个月没有用小强,最近使用,我把Kinect的USB接口插在你们指定的左侧USB2.0的接口上。小强开机会出现不能正常开机的现象,按键也是没有作用。出现Bay Trail的图标页面。之后我把Kinect插入到USB3.0的接口,Kinect指示灯一直闪烁。运行freenect-glview就是和上面情况一样。但是我把Kinect在小强主机开机的状态下插入USB2.0的接口,Kinect指示灯直接不亮了。请问这个情况怎么处理?
-
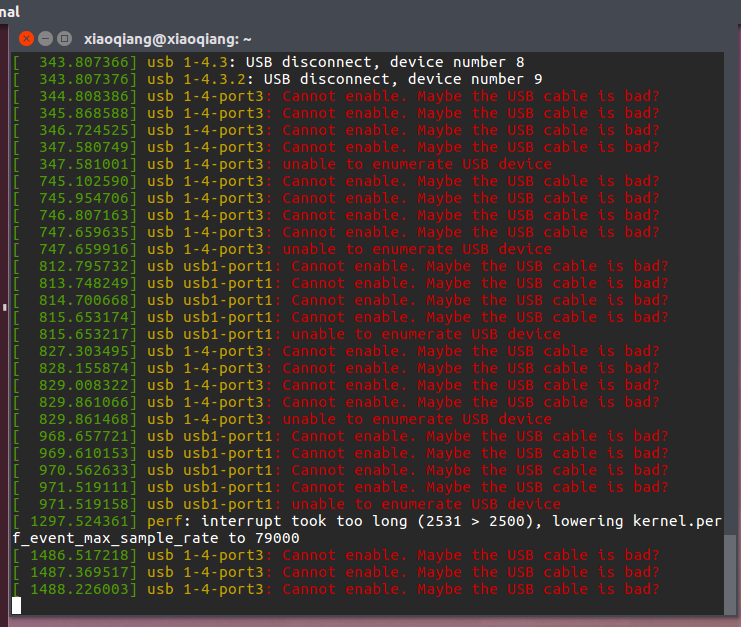
@王雷 可以在开机后运行
dmesg --follow再插入看看有什么提示信息。
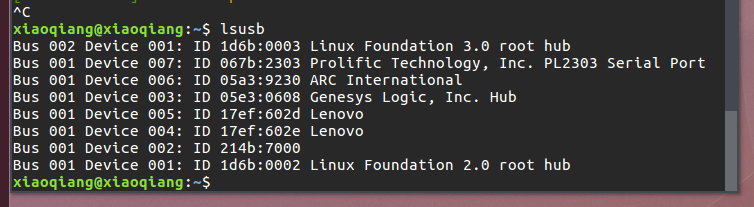
插入后运行lsusb看看设备列表里面是不是有kinect。 -
您是说开机之后运行dmesg --follow看提示的信息,之后插入Kinect到USB2.0看运行lsusb看设备列表情况?
-
-
@王雷 kinect没有识别。从错误信息看可能是硬件问题。你可以先在自己的电脑上试试能不能正常使用。