ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
伽利略导航SDK发布
-
2019.3.30
伽利略导航系统是一款用于机器人定位与导航的超高性价比的模块化的解决方案。它采用多种传感器融合定位,具有精度高,稳定性好 的特点。和传统的定位方式相比,伽利略导航系统不需要用户铺设轨道,完全图形化的人机交互界面,使用方便,维护成本低。
为了方便客户使用和开发相关的导航功能,我们发布了伽利略导航SDK。通过伽利略导航SDK用户可以在没有ROS基础的情况下使用伽利略导航系统。使用方法简单快捷,同时我们也配套了详细的文档说明,进一步降低开发难度。
伽利略导航系统SDK的相关文档可以查看这里
-
@weijiz windows下使用SDK,只需要这个文件就可以了吗?
-
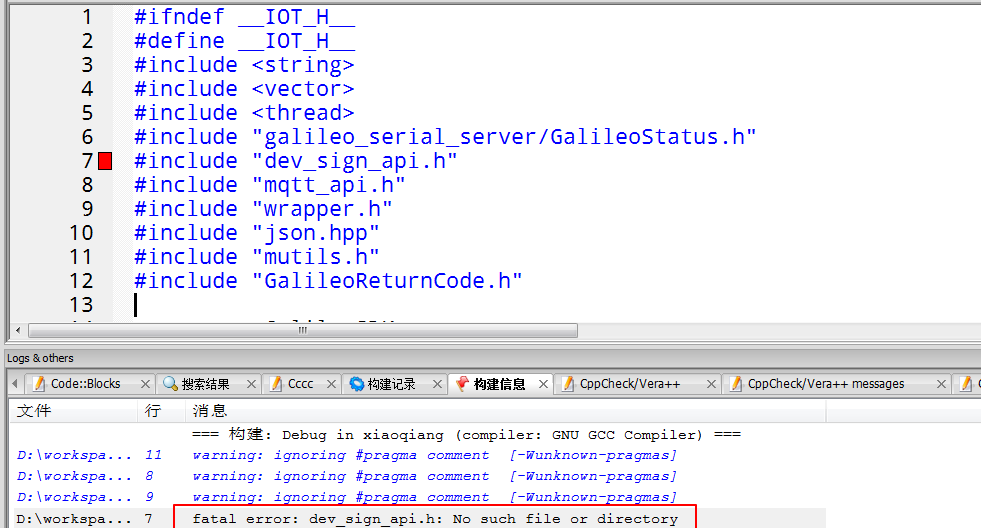
@weijiz 我按照你们的指示进行,编译时发现有大量的头文件缺失

-
@Jockey 打包时缺少了一些头文件。这里的.h文件也需要添加到头文件引用中 https://github.com/BluewhaleRobot/GalileoSDK/tree/master/iot
使用最新的1.3.4版本,已经添加了对应的头文件
-
@weijiz 好的,我试了,还是不行。错误提示,要更新boost库。
windows下是根据这个进行安装boost库吗?
-
@Jockey 不需要安装,boost已经打包进去了
-
@weijiz 编译时,会提醒
Info: Boost.Config is older than your compiler version - probably nothing bad will happen - but you may wish to look for an update Boost version. Define BOOST_CONFIG_SUPPRESS_OUTDATED_MESSAGE to suppress this message.最后编译失败

-
@Jockey 使用x64编译
-
@weijiz 刚才又试了一下,确实还有这个问题。等我检查一下
-
@weijiz 好的,我改用x64编译也是一样的,甚至警告更多了
-
@Jockey 已经发布更新了,试试最新的
-
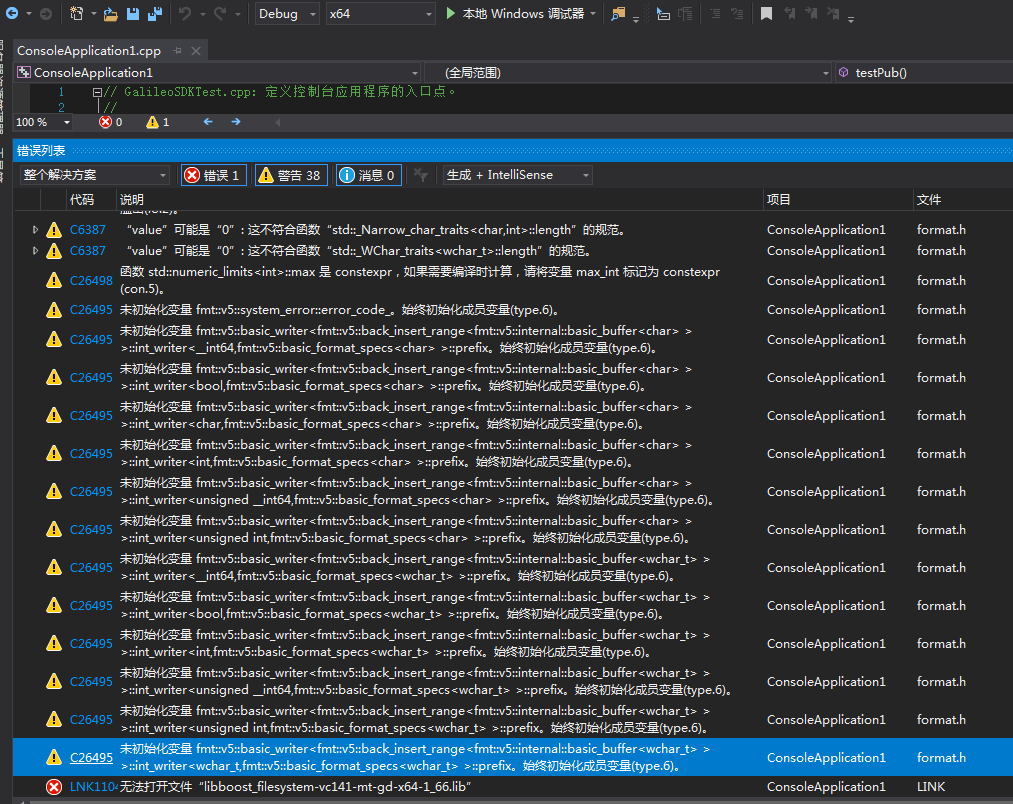
@weijiz 没有之前的错误了,但是编译时出现了更多其它的错误
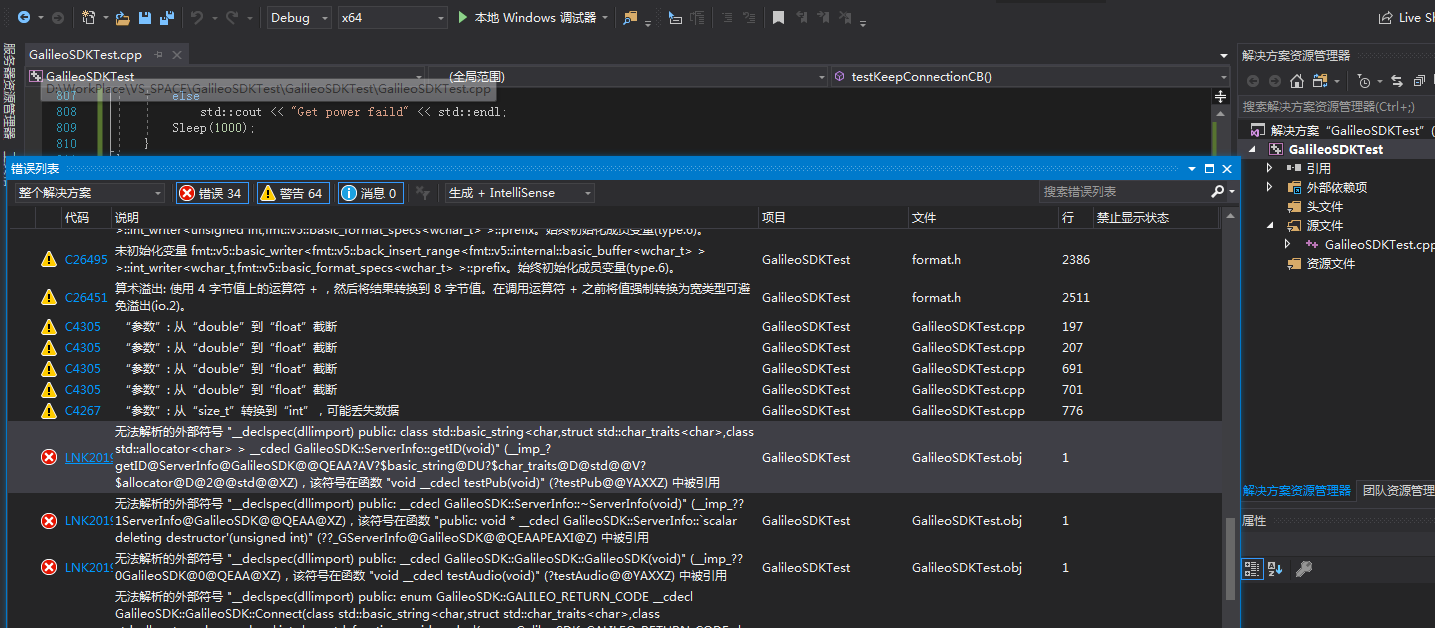
不知道是不是我的操作导致了错误,操作过程如下:
我用你们项目中的文件GalileoSDKTest.cpp作为测试文件。https://github.com/BluewhaleRobot/GalileoSDK/blob/master/GalileoSDKTest/GalileoSDKTest.cpp
包含了你们最新release中GalileoSDK-win-1.3.5.tar.gz中的include头文件夹
将其中lib文件路径添加到了附加库目录中了
将其中dll文件路径也放到了项目调试环境中了。 -
-
-
@weijiz 当局域网中没有机器人,进行连接的时候就会报错吗?

-
@Jockey 因为dll发布的是release版本的,你的程序也要用release版才行
-
-
@Jockey 新发布的版本增加了debug库,可以在debug模式下使用
-
@weijiz sdk发送过来的命令,该从哪个目录下的日志进行验证
-
@weijiz sdk发送过来的命令,该从哪个目录下的日志进行验证

