ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强教程20出现问题
-
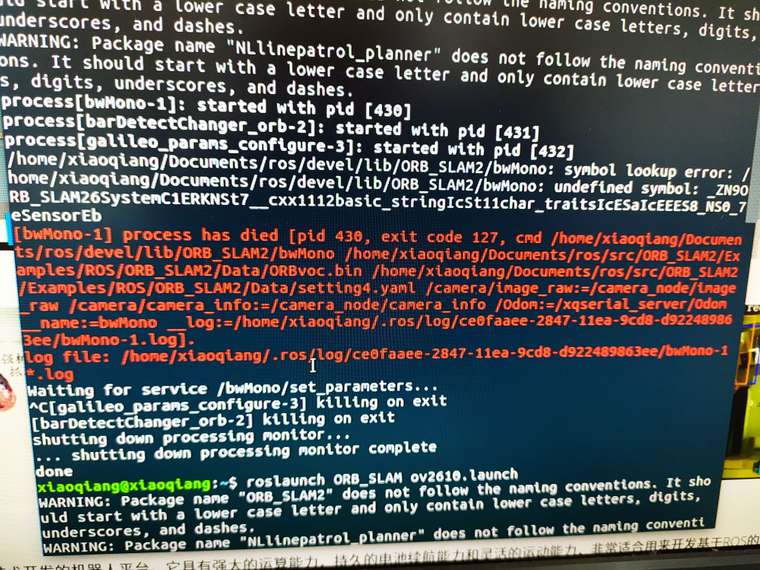
运行roslaunch ORB_SLAM2 map.launch出现下图问题
-
此回复已被删除! -
@rongrong1314 你的ORB_SLAM2程序有问题,是小强的原版程序吗,你好像重装系统了。
-
运行roslaunch ORB_SLAM ov2610后,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,就报错
-
@weijiz 运行roslaunch ORB_SLAM ov2610后,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,就报错
-
@rongrong1314 小强的ORB_SLAM2只能在小强上运行,而且需要证书。重装系统之后证书就没了
-
@weijiz 你好,我现在跑的是教程上教程20视觉里程计,系统没有重装,运行到rosrun orb_init orb_scale.py的时候roslaunch ORB_SLAM ov2610这个出错了
-
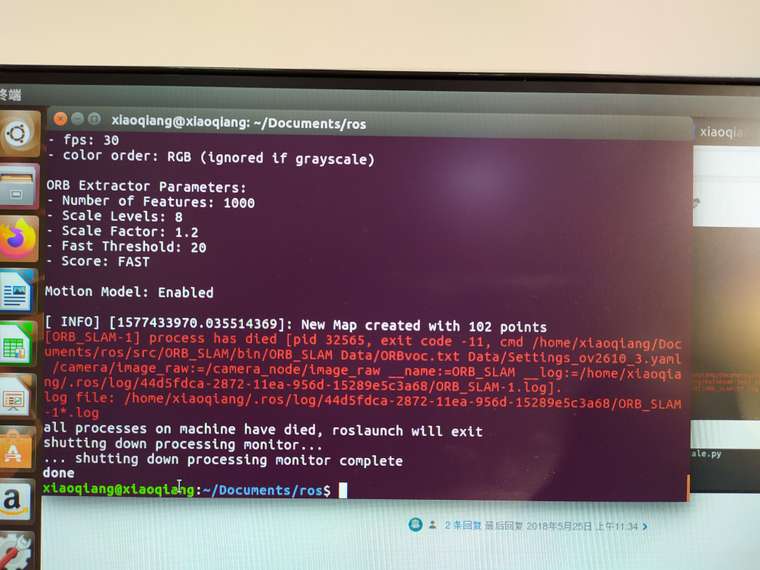
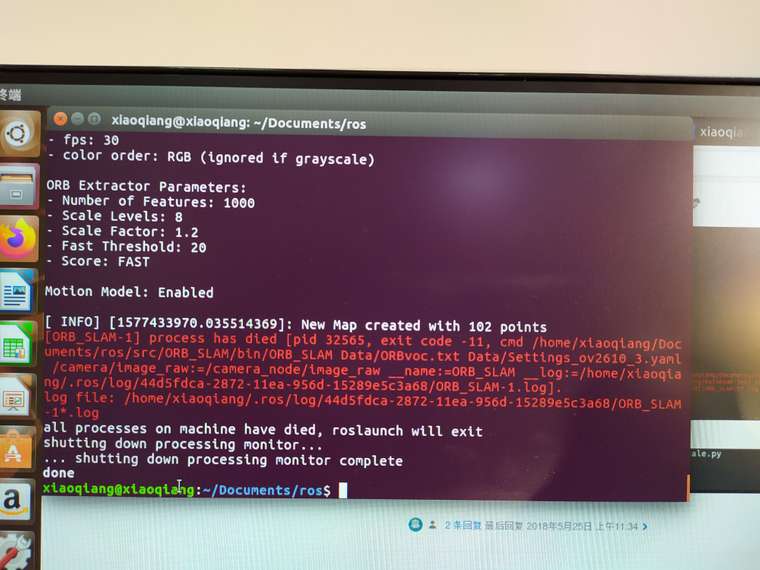
@weijiz ORB_SLAM ov2610.launch这个程序飞了

-
@rongrong1314 教程20里面没有你的这个指令,你的文档是不是很久之前的。 教程20
-
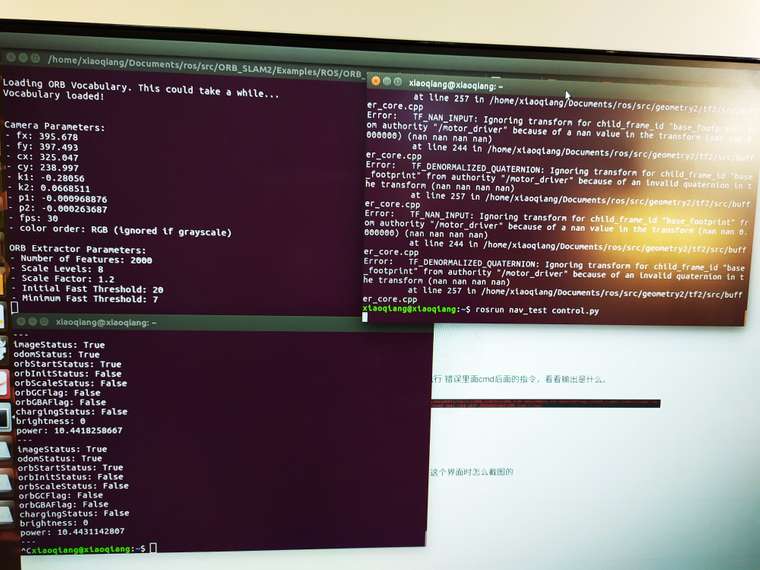
@weijiz 您好,照着您刚刚给的教程跑,没有错误,但是没有反应,跑了好远初始化不成功
-
@rongrong1314 看看/ORB_SLAM/Frame 图像输出是什么样的
-
@weijiz 开了rviz车子一动就ORB_SLAM2 map.launch程序就飞了
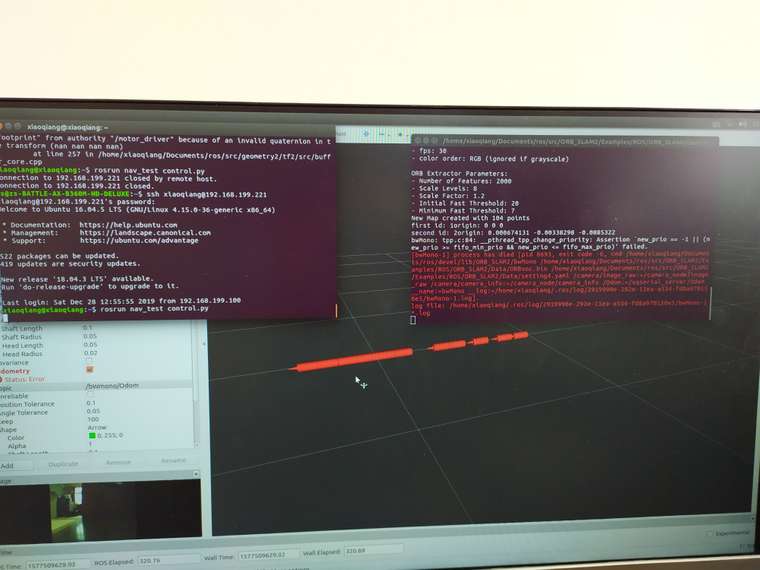
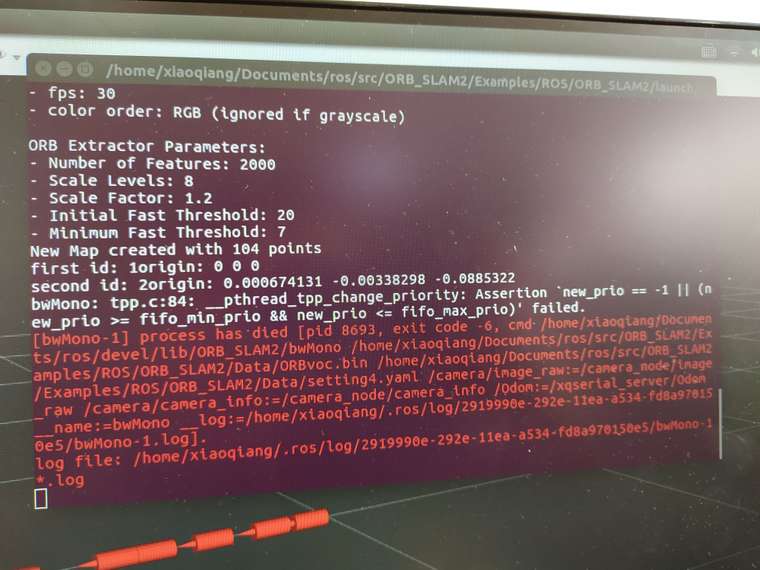
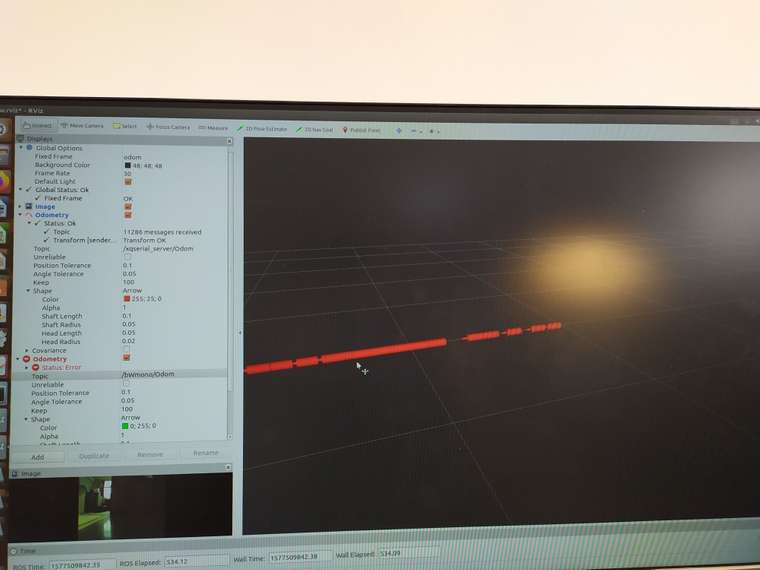
-
@weijiz 您好,我刚刚问了实验室的,他们说这个小强应该以前重装系统,如果重装过,这个证书怎么获得
-