ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
底盘状态显示为False
-
在小强机器人运行正常的情况下,拔掉一次底盘USB串口通讯连接线,重新连接后发现底盘状态显示为False。底盘串口能够正常识别且名称能够对应。对所有服务进行重启后没有解决问题。请求大佬们帮忙解答一下,怎么解决这个问题!非常感谢!
-
@wyx 1.整车重启。2.sudo service startup stop关闭服务,roslaunch startup startup.launch手动启动服务launch文件,看错误提示
-
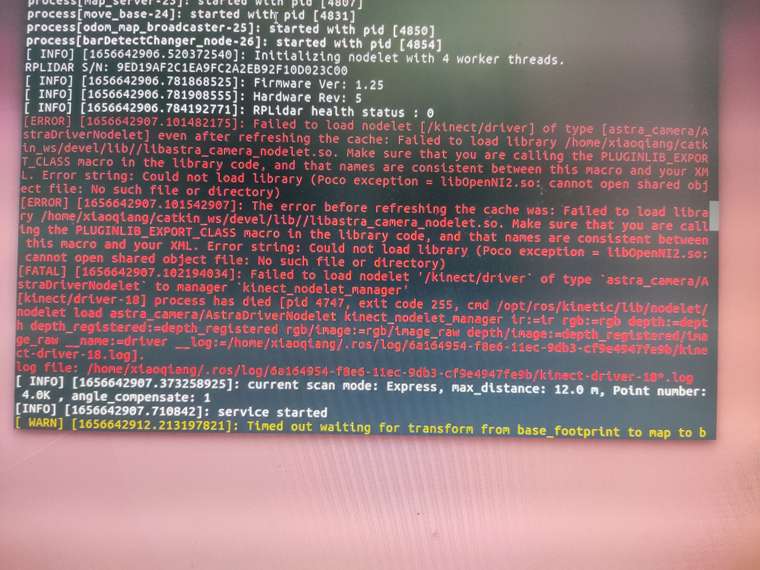
@xiaoqiang 按照您的提示指导进行操作,错误提示框是一些关于深度相机的,我们本身也没有用相机。没发现关于底盘问题的错误提示。具体错误提示如下: