ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(12)___ROS显示kinect2代的点云
-
本教程适用于2016年12月之后购买的小强用户,在此之前购买的用户请自行根据这篇教程安装kinect2代驱动。
1启动kienct2代的ROS驱动
小强底盘输出一个12v电源(DC头,贴有“kinect供电”标签)用于kinect 供电,kinect2代需要插入小车主机蓝色usb3.0接口。
将小强主机接入显示器和键盘,在小强主机上打开一个命令行终端输入roslaunch kinect2_bridge kinect2-xyz.launch2新开1个命令行终端,启动rviz
rviz打开这个rviz配置文件
/home/xiaoqiang/Documents/ros/src/iai_kinect2/kinect2_bridge/launch/rviz.rviz,点击可下载本文件
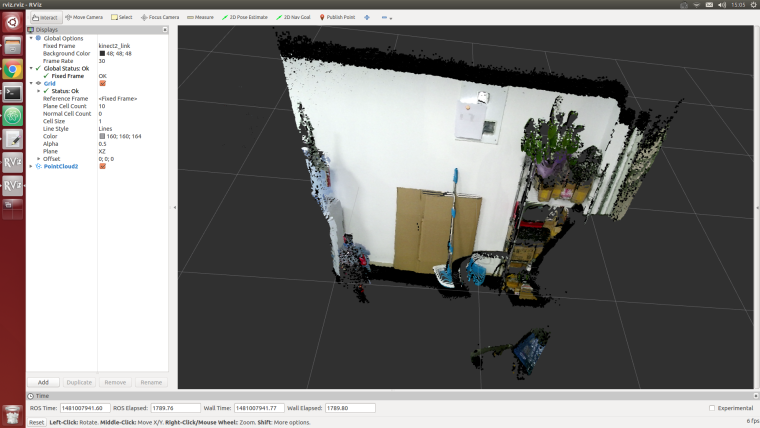
一切正常的话,可以出现类似下图的界面