ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
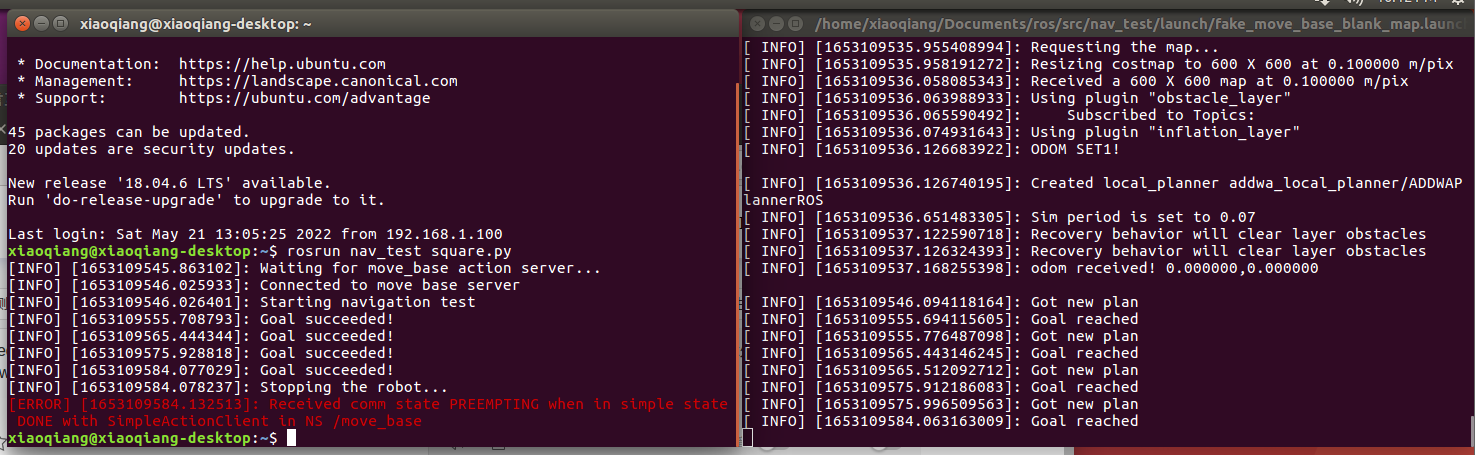 可以成功跑完正方形,但是一旦成功到达原点后就会报错
可以成功跑完正方形,但是一旦成功到达原点后就会报错
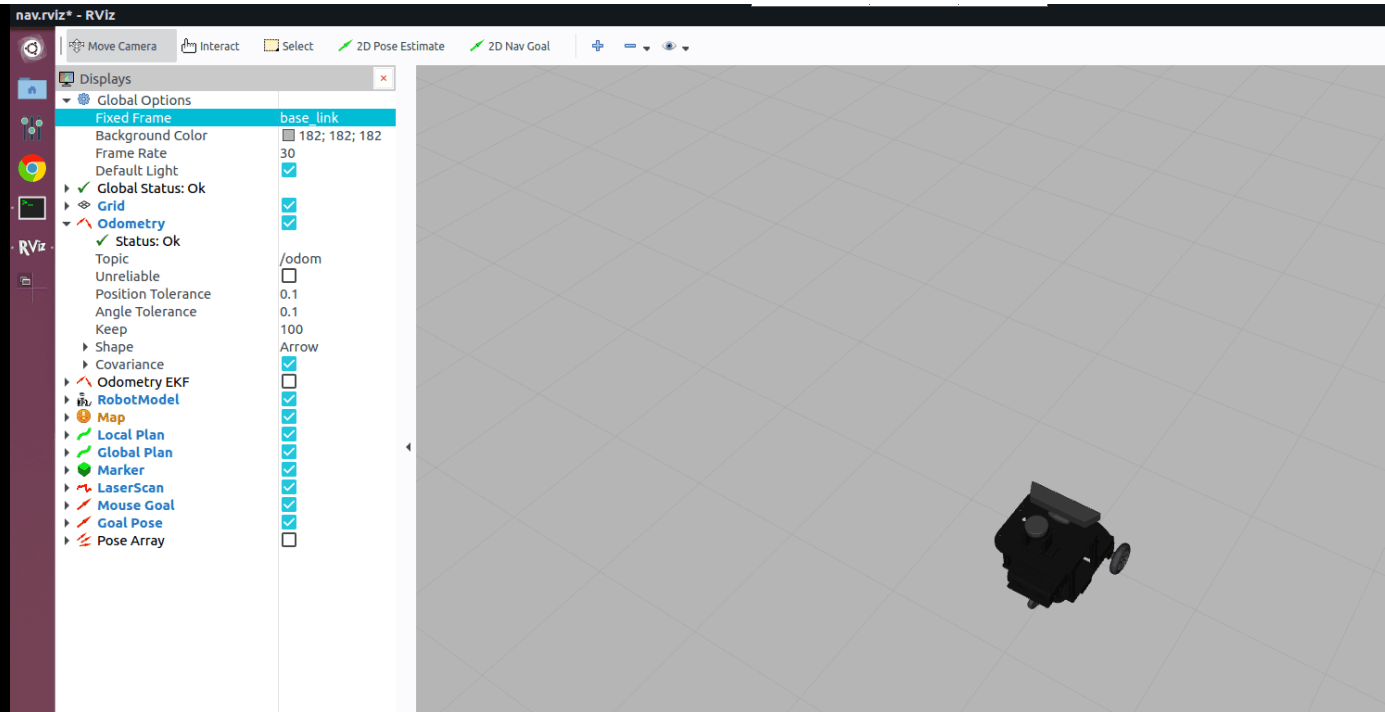 使用rviz打开/ros/src/nav_test/config/nav.rviz图像没有四个方块和方向箭头
使用rviz打开/ros/src/nav_test/config/nav.rviz图像没有四个方块和方向箭头