ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
谷歌cartographer使用timoo 3d激光雷达数据进行建图(在线3d模式)与纯定位
-
1. 保证底盘驱动和激光雷达驱动已经正常运行。
rostopic hz /xqserial_server/Odom #有50hz数据就表示底盘驱动正常 rostopic hz /timoo_points #有10hz数据表示激光雷达驱动正常2. 启动cartographer在线建图节点
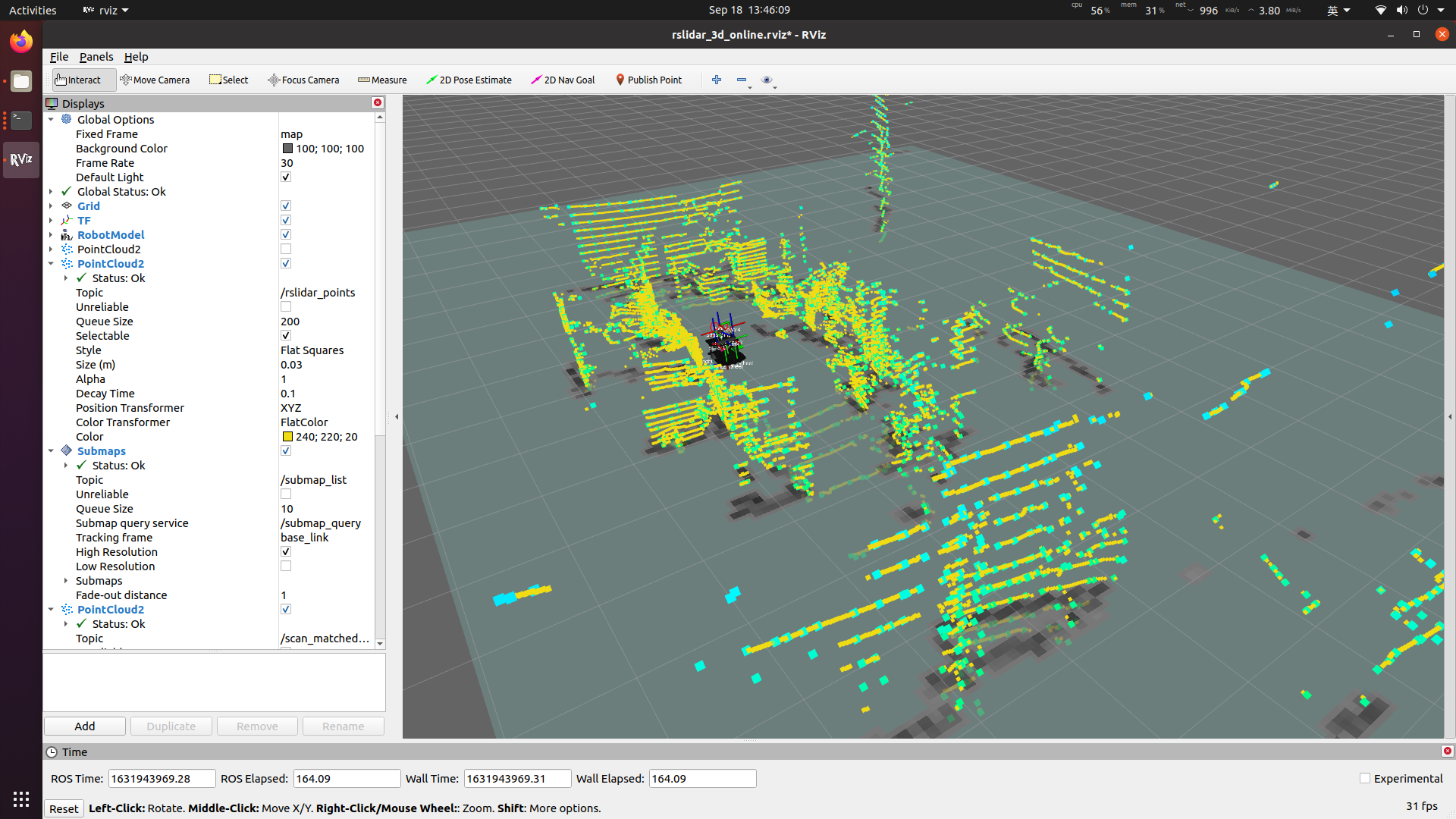
roslaunch cartographer_ros xiaoqiang_timoo_3d_online.launch在rviz中打开/home/xiaoqiang/Documents/ros/src/cartographer_ros/cartographer_ros/configuration_files/timoo_3d_online.rviz配置文件
可以看到下图
3. 用windows客户端或者ps4手柄遥控小车移动开始建图,建图完成后调用地图保存命令
#先结束建图 rosservice call /finish_trajectory 0 #再保存地图文件 rosservice call /write_state /home/xiaoqiang/local_test.pbstream #local_test.pbstream这个文件后面就可以用于定位模式4. 关闭建图节点,开启测试定位节点。
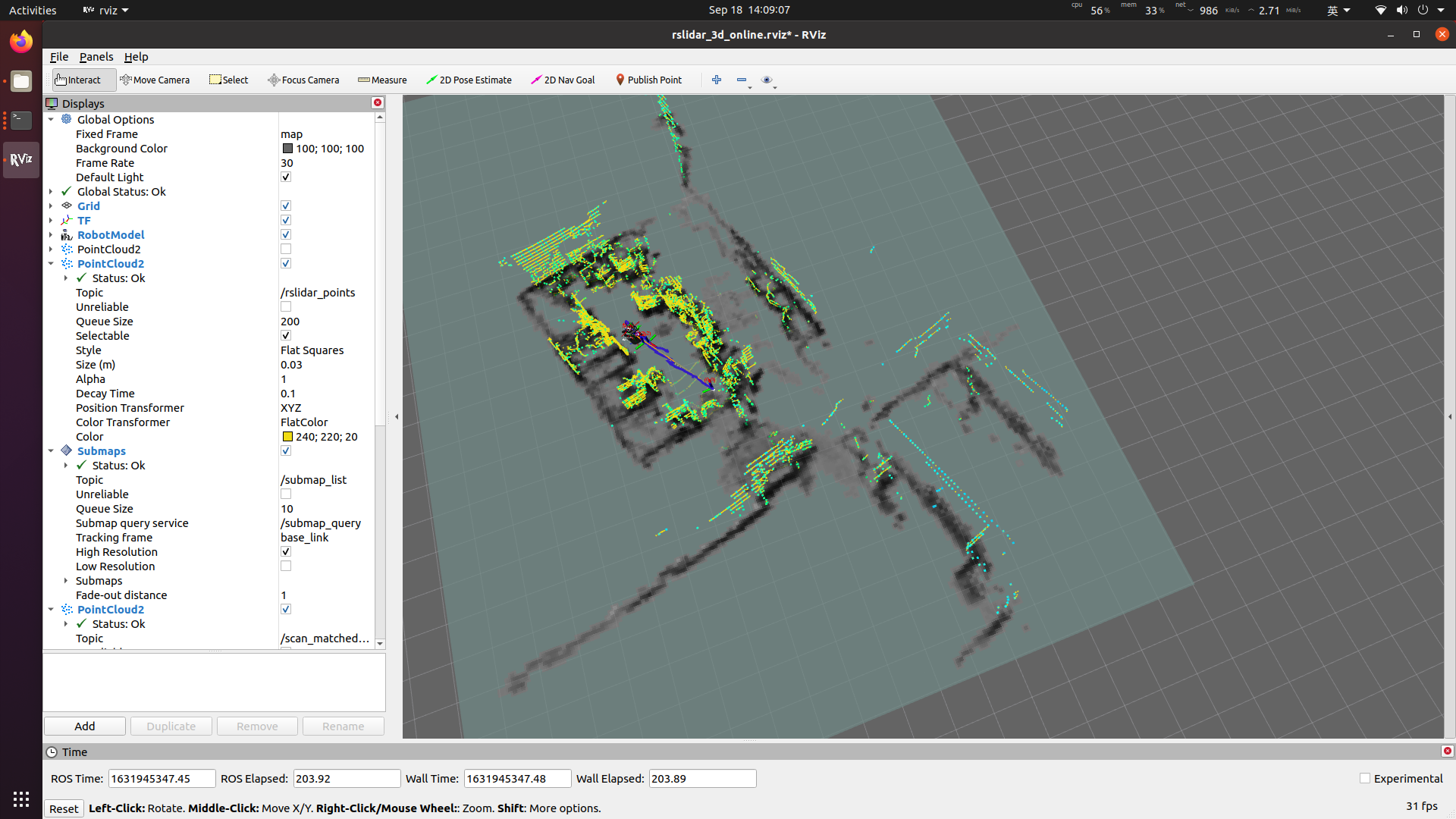
roslaunch cartographer_ros xiaoqiang_timoo_3d_localization.launch load_state_filename:=/home/xiaoqiang/local_test.pbstream启动后正常会在rviz中显示如下类似界面,可以看到之前建立的地图轮廓和当前点云。刚开始初始位置不对,所以没有对齐。
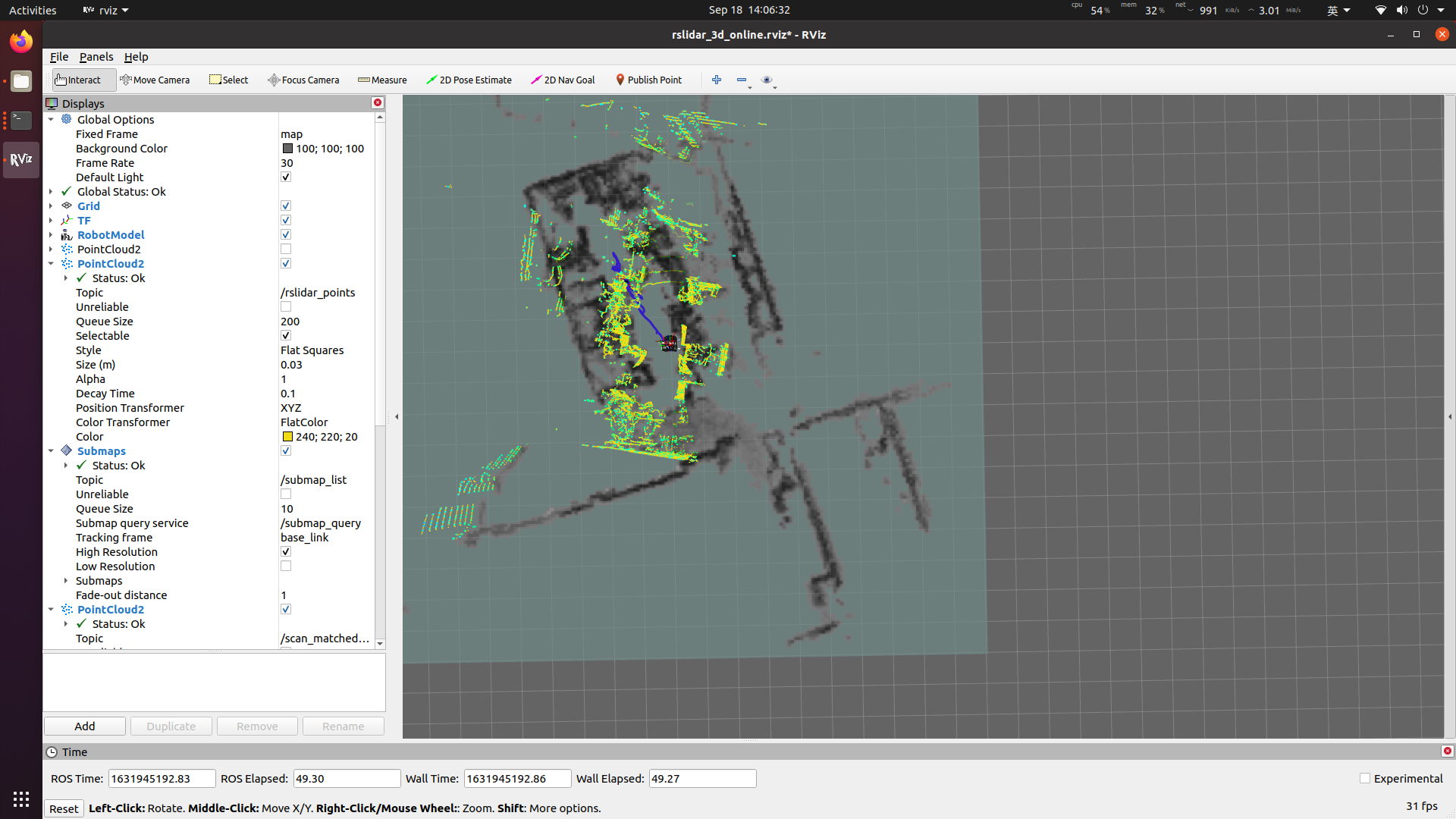
4. 用windows客户端或者ps4手柄遥控小车移动一段距离,在rviz可以看到点云会变成和地图轮廓重合,机器人重定位完成。即从现在开始,机器人在地图中的位置是准确的,可以用于导航了。