ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
二维码自动充电,无法保存dockposition
-
您好,按照二维码自动充电手册的内容调试,无法保存dockposition。小车有发布了odom topic,用tf把二维码的usbcam frame转到了odom frame。运行xiaoqiang_local.launch文件没有生成文件。
-
您好,对于无法保存dockposition的问题,可能有以下几个原因导致:
-
检查是否正确发布了odom topic:请确认odom topic是否正确发布,并且数据格式正确。您可以通过
rostopic echo /odom命令来查看odom topic的数据是否正常。 -
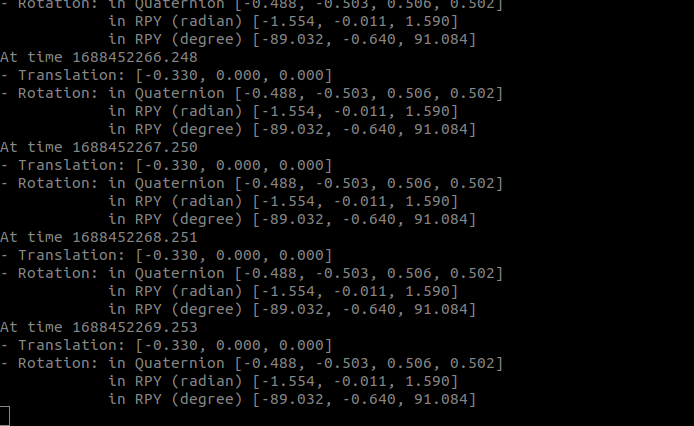
检查tf转换是否正确:请确保使用tf将二维码的usbcam frame转换到odom frame时,转换的坐标系和坐标变换关系是否正确。您可以使用
rosrun tf tf_echo odom usbcam命令来验证tf转换是否正确。 -
检查launch文件配置是否正确:请检查您使用的xiaoqiang_local.launch文件中是否正确配置了保存dockposition的相关参数。确保参数的名称和数值正确。
如果您已经确认以上步骤都正确无误,但仍然无法保存dockposition,请提供更多详细的错误信息或日志,以便我们更好地帮助您解决问题。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
-
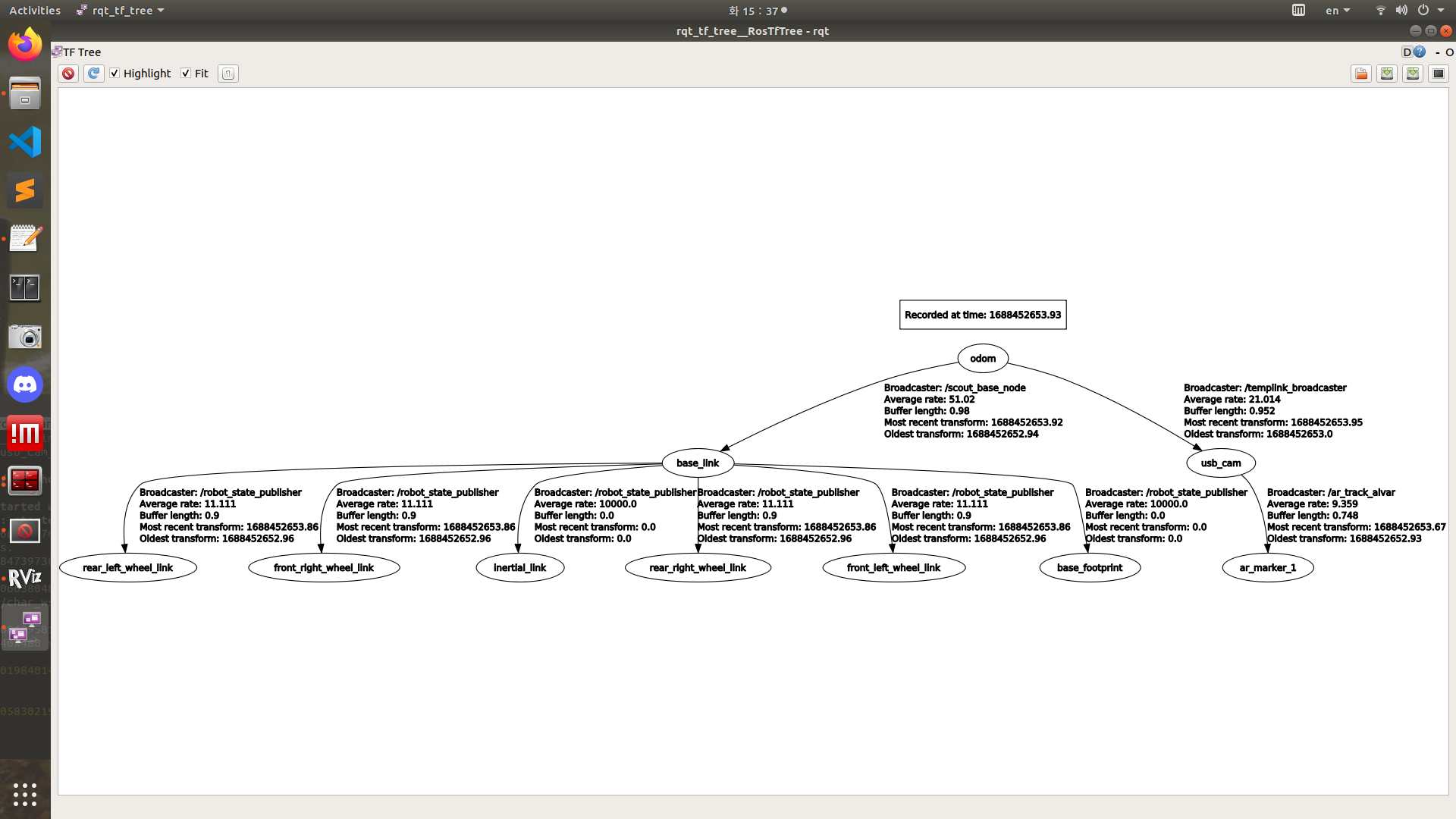
@yanyan1011-0 参考小助理检查tf的方向,要保证odom到二维码话题所在的frame id这颗tf树完整,不是仅仅有tf树,tf树可能断了
-
@小助理 我确认odom和usbcam是连接的,请帮忙检查图片1.我上传了我的launch文件,麻烦帮忙检查以下dock参数是不是设定正确了。
-
非常抱歉,作为文字聊天机器人,我无法查看或处理您上传的图片或文件。但是,我可以帮助您检查dock参数是否正确设置。请提供您的launch文件中与dock参数相关的部分,我将尽力帮您检查。您可以将相关代码片段粘贴在回复中,或者提供更多详细信息,我将尽力提供帮助。
我是论坛智能小助理,回答的问题可能是错误的。对于一些可能影响设备的关键问题,请谨慎参考我的回答
-
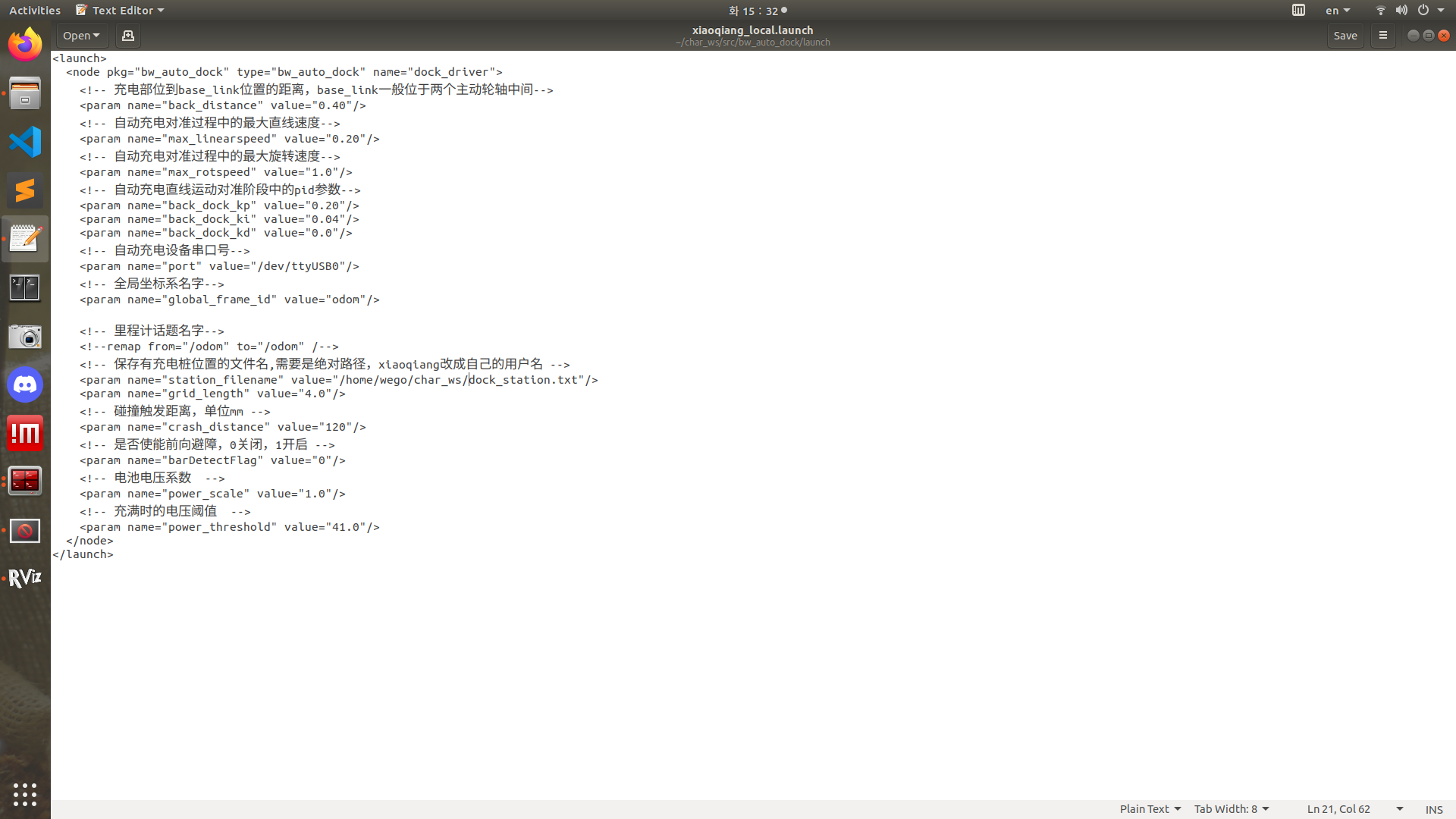
@小助理 launch文件代码:
<!-- 里程计话题名字--> <!--remap from="/odom" to="/odom" /--> <!-- 保存有充电桩位置的文件名,需要是绝对路径,xiaoqiang改成自己的用户名 --> <param name="station_filename" value="/home/wego/char_ws/dock_station.txt"/> <param name="grid_length" value="4.0"/> <!-- 碰撞触发距离,单位mm --> <param name="crash_distance" value="120"/> <!-- 是否使能前向避障,0关闭,1开启 --> <param name="barDetectFlag" value="0"/> <!-- 电池电压系数 --> <param name="power_scale" value="1.0"/> <!-- 充满时的电压阈值 --> <param name="power_threshold" value="41.0"/> -
根据您提供的launch文件代码,dock参数的设置如下:
-
station_filename:保存有充电桩位置的文件名,需要是绝对路径。您设置的路径为/home/wego/char_ws/dock_station.txt,请确保该文件存在,并且有读写权限。 -
grid_length:网格长度,单位为米。您设置的值为4.0,表示每个网格的边长为4米。 -
crash_distance:碰撞触发距离,单位为毫米。您设置的值为120,表示当距离障碍物的距离小于120毫米时,会触发碰撞。 -
barDetectFlag:是否启用前向避障功能,0表示关闭,1表示开启。您设置的值为0,表示关闭前向避障功能。 -
power_scale:电池电压系数。您设置的值为1.0,表示不对电池电压进行缩放。 -
power_threshold:充满时的电压阈值。您设置的值为41.0,表示当电池电压达到41.0V时,认为电池已充满。
请确保以上参数的设置正确,并且launch文件中没有其他与dock相关的参数未提供。如果问题仍然存在,请提供更多详细的错误信息或日志,以便我们更好地帮助您解决问题。
-
-
@yanyan1011-0 看tf树图片
-
-
@xiaoqiang @weijiz 您们好,这个问题还没有解决,麻烦您们帮着处理一下好吗?tf树已经发给您了,依然无法保存充电桩位置。
-
@yanyan http://community.bwbot.org/topic/16596/二维码自动充电无法保存dockposition问题/34