ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
蓝鲸ROS测试版v1.0a发布
-
发布时间: 2017-5-24 10:13:50
下载地址
MD5: 9b70cf95a73747396c2669b86ae24fe8
这两个文件都是需要的,下载完成后再解压可以得到iso文件。
下载完成之后一定要做一下md5的检查,确认文件完整性
注意安装时的用户名只能是xiaoqiang,否则会有问题系统截屏展示

更新信息
- 增加
AutoWifi功能,第一次使用时可以不连接显示器,直接设置小强的无线网络。具体使用可以参照这里。 - 增加
蓝鲸个人中心功能。可以通过个人中心方便的对自己的设备进行控制。具体使用可以参照这里。 - 增加一些有用的指令,比如修复udev规则,自动更新,获取ID信息。具体使用可以参照这里。
- 设置用户更加友好的系统主题。
- 增加远程桌面功能。
- 修复一些bug。比如删除安装完成之后的残留文件。
- 整理系统内的文件结构。
安装说明
在虚拟机中安装
打开虚拟机软件,这里使用的是Virtualbox。下载地址
点击创建按钮,开始创建虚拟机
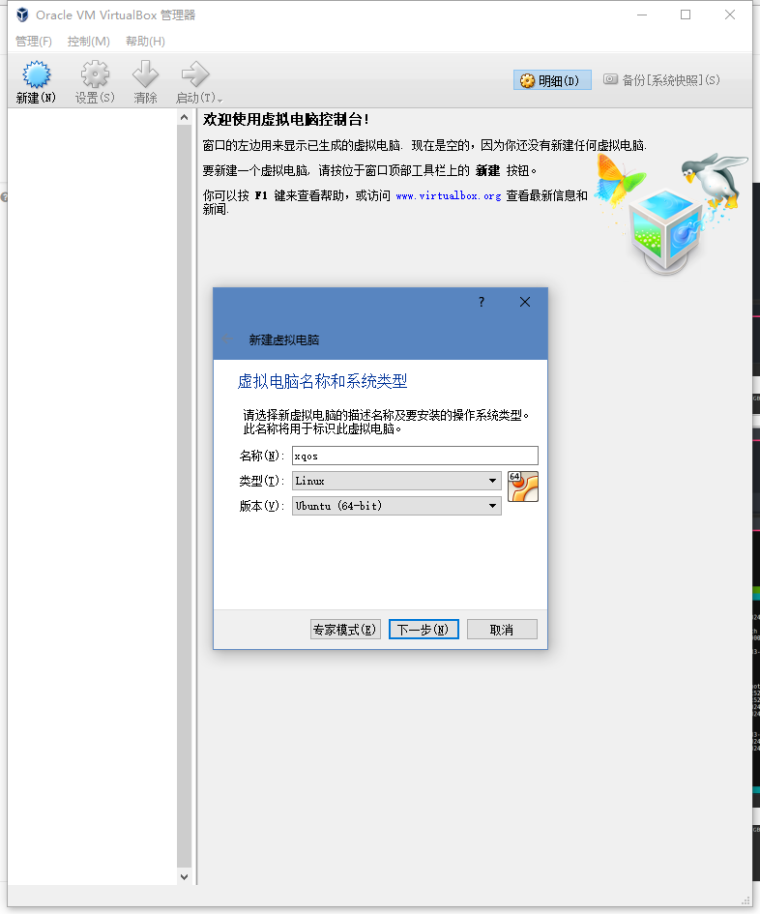
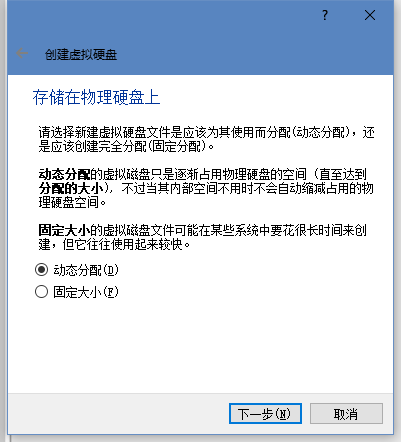
按照图上设置,完成后点击下一步
内存建议设置成2G,内存太小可能会导致无法启动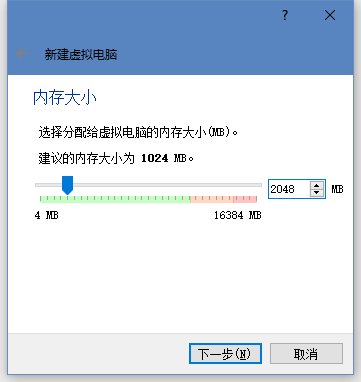

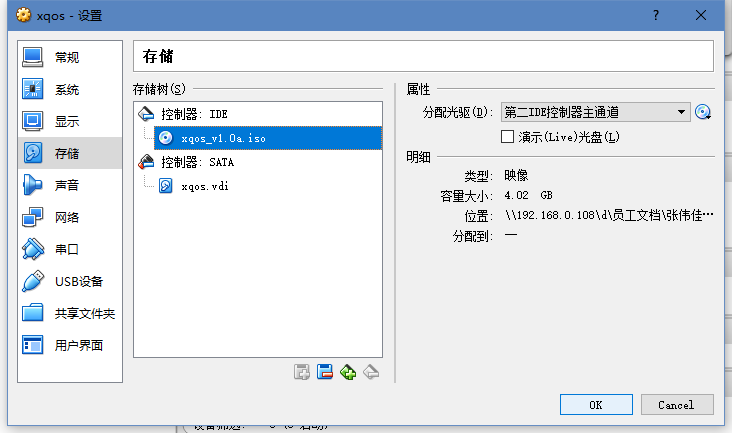
设置完成后,点击上面的设置按钮。在弹出的对话框中选择存储。点击存储界面右侧的光盘图标设置镜像文件
设置完成之后点击主界面的启动按钮。等待载入系统的选择界面。
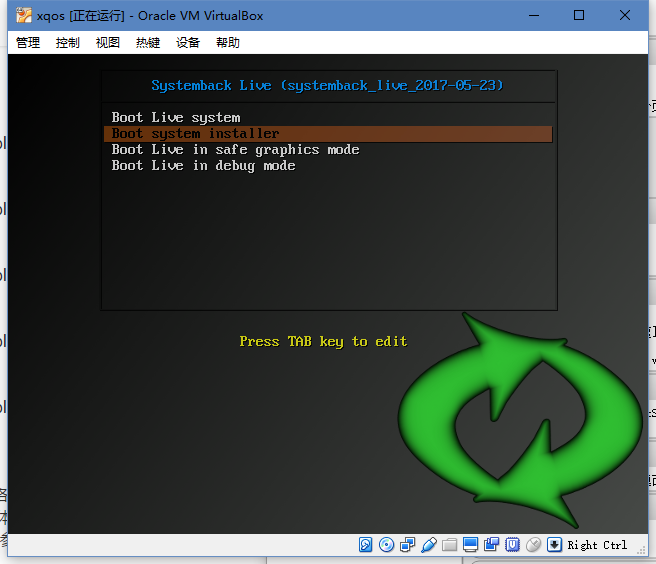
如果想要安装系统则选择第二个选项,之后按回车确认。
等待系统安装程序载入,这个过程和你的机器性能相关,如果机器性能较差可能会载入较长时间。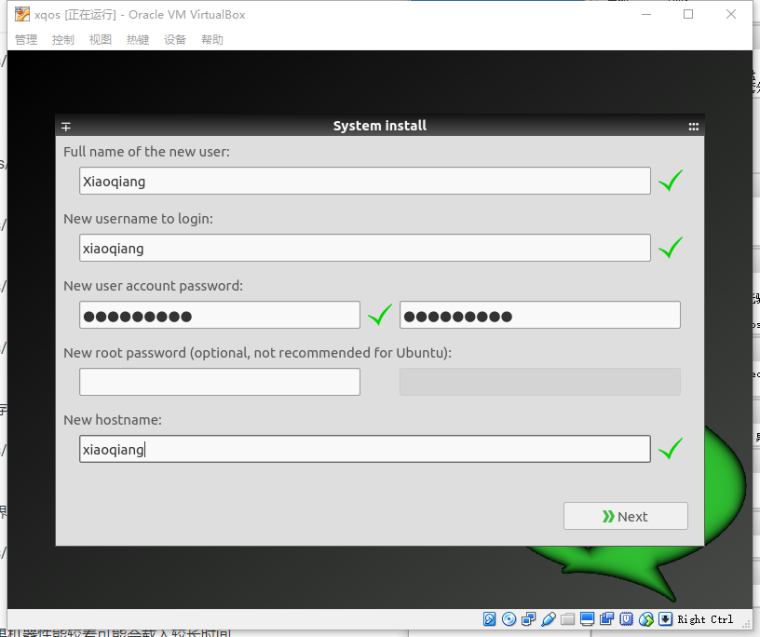
载入完成之后设置用户信息,注意用户只能是
xiaoqiang, hostname可以随意设置。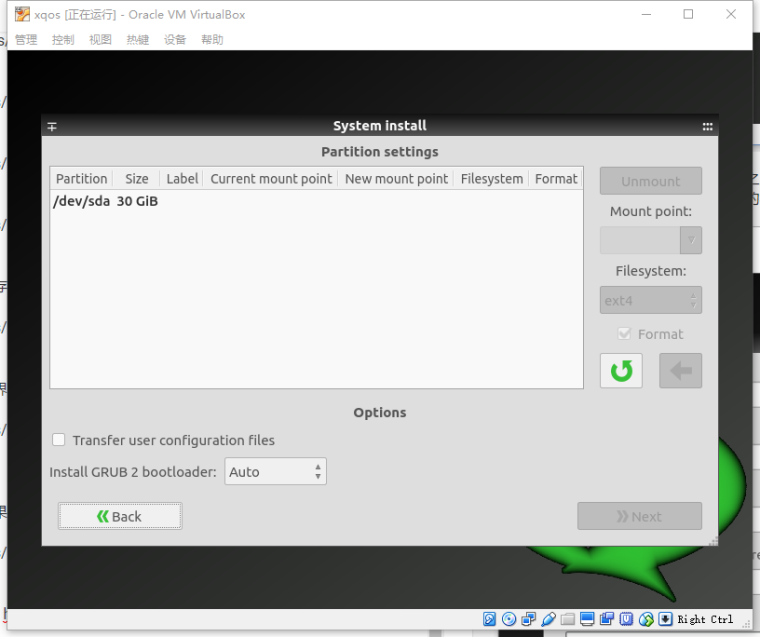
点击下一步进入分区界面。
选中你要安装的硬盘,然后点击Delete按钮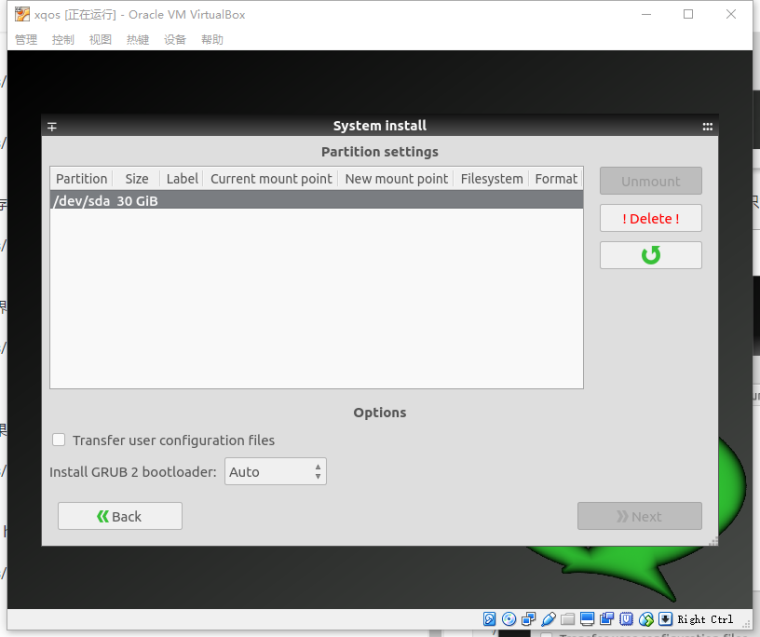
再次选择硬盘中的新分区
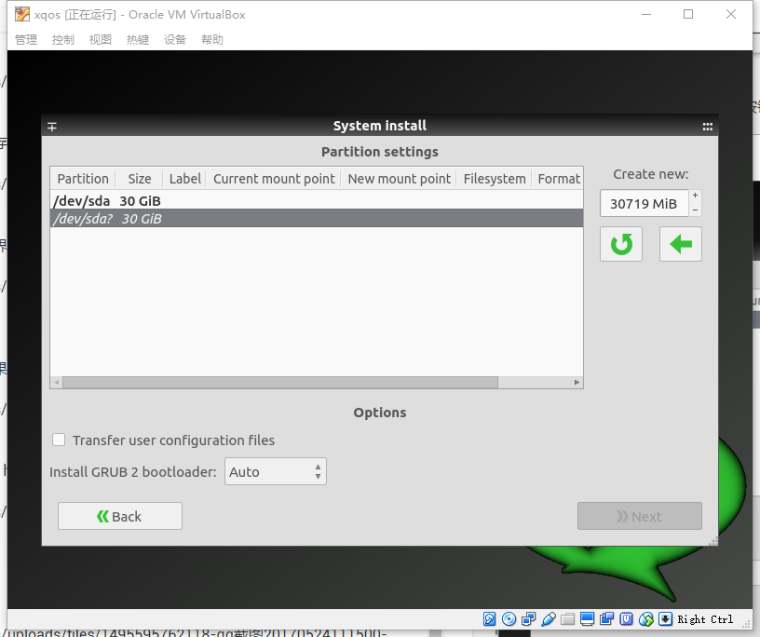
点击箭头进入下一步
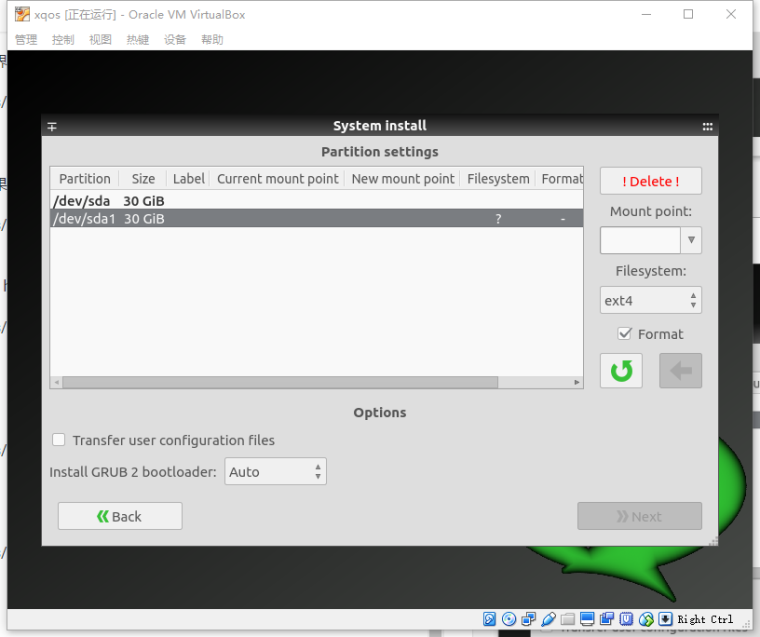
再次选择刚才新建的分区
设置右侧的Mount point,再次点击箭头进入下一步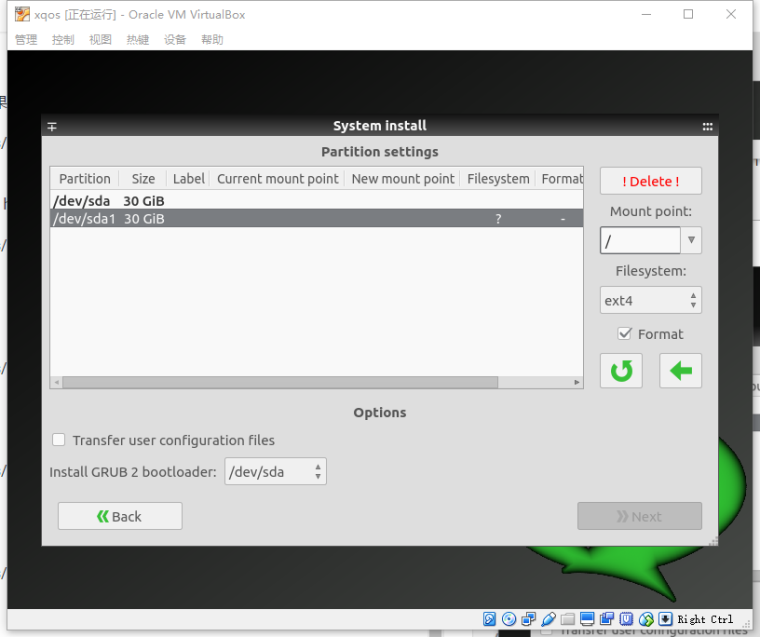
点击右下角的next就可以继续了。如果你还想设置其他分区可以按照以上的步骤进行设置。
等待系统安装完成后重新启动就可以了。
在实际的电脑上安装
安装过程和一般的安装Ubuntu是一样的。下面介绍一下如何用U盘安装系统。
首先你要在自己的硬盘上准备一个空白的分区用来安装系统。
然后下载ultroiso软件。 下载地址
在电脑上插入自己的U盘。
用软件打开iso文件。在菜单栏中选择启动 -> 写入硬盘镜像,弹出界面如下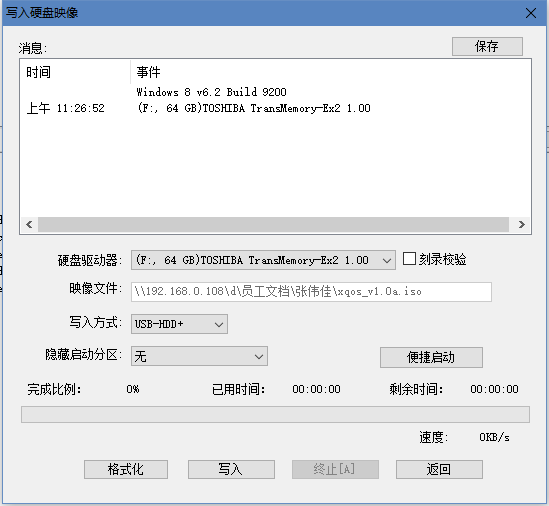
点击写入,等待写入完成。
写入完成之后,把U盘插入想要安装系统的电脑上。启动时进入BIOS选项,选择从U盘启动。后面的安装过程就基本上是一样的了。
注意在分区的时候,要给boot单独的分区,然后选择下面的grub安装位置。否则系统安装完成后是无法启动的。对于不同的启动方式分区也有些不同。以grub方式启动的要给/boot单独分区,以uefi方式启动的要给/boot/efi单独分区 - 增加