ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
請教 BW-DR03 轮毂电机驱动器 DiffDriverController.cpp 程式原碼的原理?
-
你好:
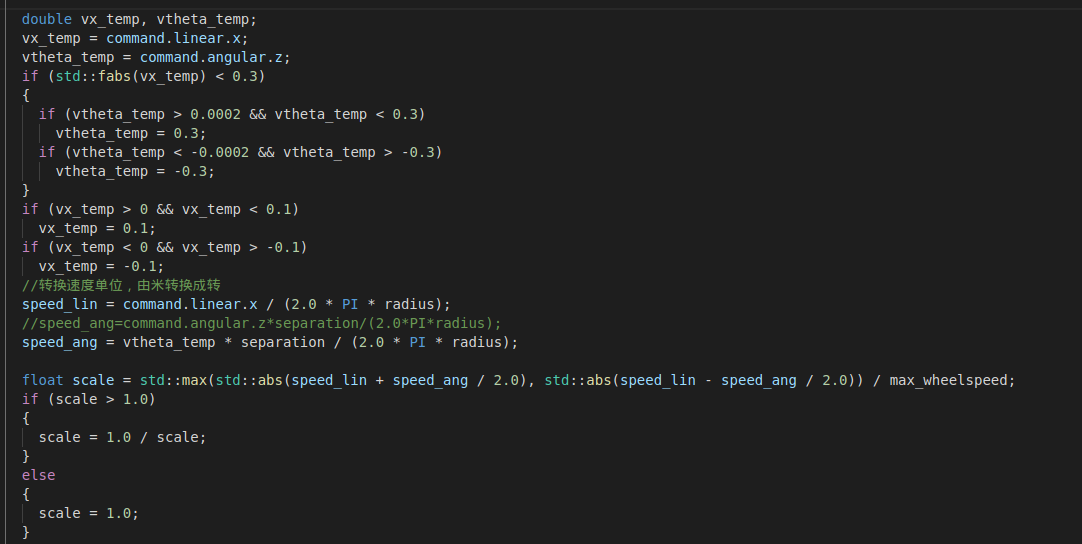
請問 DiffDriverController.cpp 程式原碼 中 以下這一段的原理是什麼?
-
@josephchen5 百度“差速小车控制原理”
-
@frank 在 請教 BW-DR03 轮毂电机驱动器 DiffDriverController.cpp 程式原碼的原理? 中说:
百度“差速小车控制原理”
你好,我知道“差速小车控制原理”,請問為何vx_temp<0.3 時要連帶判斷vtheta_temp>0.0002&&vtheta_temp<0.3
-
@josephchen5 这可以看成是最小速度过滤,你可以删掉
-
@frank 在 請教 BW-DR03 轮毂电机驱动器 DiffDriverController.cpp 程式原碼的原理? 中说:
以看成是最小速度过滤,你可以删掉
謝謝