ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
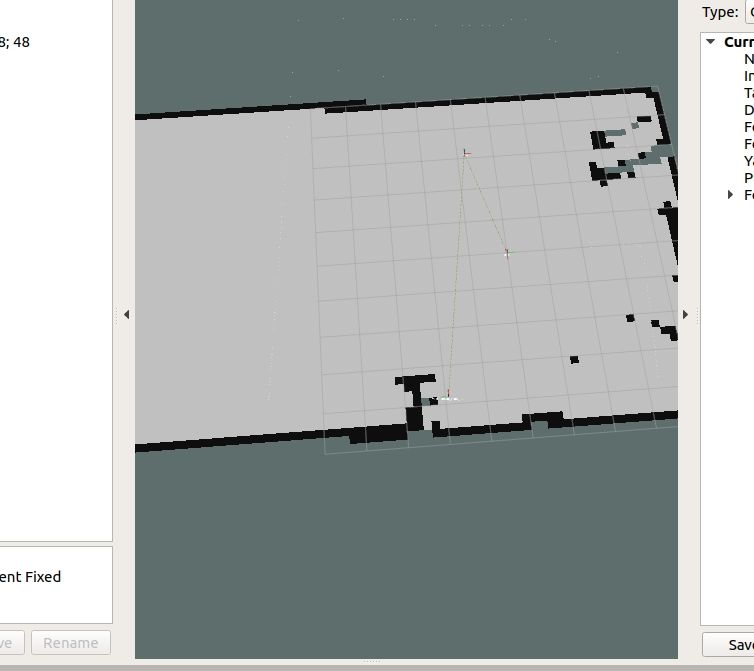
求助,在开启move_base导航包前坐标轴没有问题,但是一旦开了move_base导航包,坐标轴就乱跳
-
求助,在开启move_base导航包前坐标轴没有问题,但是一旦开了move_base导航包,坐标轴就乱跳
costmap_common_params.ymal#“obstacle_range”参数决定了引入障碍物到代价地图的传感器读数的最大范围。我们把它设定为2.5米,这意味着机器人只会更新以其底盘为中心半径2.5米内的障碍信息. obstacle_range: 2.5 #“raytrace_range”参数确定的空白区域内光线追踪的范围。 设置为3.0米意味着机器人将试图根据传感器读数清除其前面3.0米远的空间。 raytrace_range: 3.0 #指定的footprint时,机器人的中心被认为是在(0.0,0.0),顺时针和逆时针规范都支持。 footprint: [[0.25, 0.4], [0.25, -0.4],[-0.25, -0.4],[-0.25, 0.4]] #robot_radius: ir_of_robot #代价地图膨胀半径 inflation_radius: 0.55 #“observation_sources”参数定义了一系列传递空间信息给代价地图的传感器 #observation_sources: laser_scan_sensor #point_cloud_sensor laser_scan_sensor: {sensor_frame: base_laser, data_type: LaserScan, topic: /scan, marking: true, clearing: true} #point_cloud_sensor: {sensor_frame: frame_name, data_type: PointCloud, topic: topic_name, marking: true, clearing: true}global_costmap_params.yaml
global_costmap: #“global_frame”参数定义了代价地图运行所在的坐标帧。 global_frame: map #“robot_base_frame”参数定义了代价地图参考的的机器底盘的坐标帧。 robot_base_frame: base_link #“update_frequency”参数决定了代价地图更新的频率。 update_frequency: 5.0 #“static_map”参数决定代价地图是否根据map_server提供的地图初始化。如果你不使用现有的地图,设为false。 static_map: truelocal_costmap_params.yaml
local_costmap: global_frame: odom robot_base_frame: base_link update_frequency: 5.0 publish_frequency: 2.0 static_map: true #将“rolling_window”参数设置为true,意味着随着机器人在现实世界里移动,代价地图会保持以机器人为中心。 rolling_window: true width: 6.0 height: 6.0 resolution: 0.05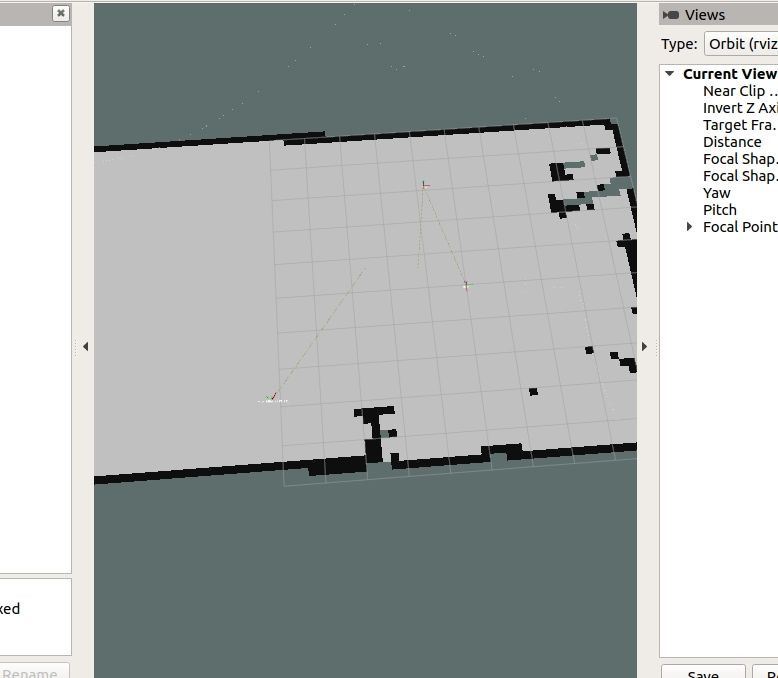
-
@JackyMao 乱跳不是move_base导致的,是和move_base一起启动的其它能发布tf关系的节点导致的,找错对象了
-
此回复已被删除! -
@xiaoqiang 是的,现在已经解决了,的确是tf之间的关系导致的,谢谢