ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用语音控制导航
-
原理简介
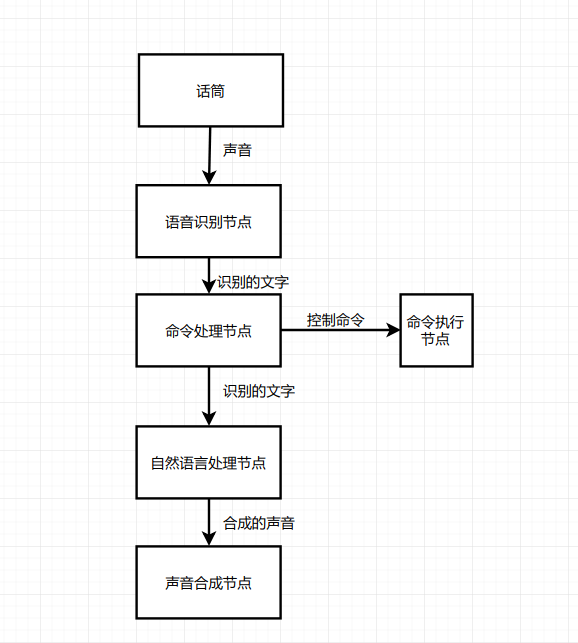
在这篇教程中,我们使用语音去控制机器人导航。比如对机器人说到一号点机器人就会自动前往一号目标点。原理上是通过话筒收集声音,经过语音识别得到语音对应的文字。然后将这些文字和指令进行匹配,如果成功匹配则执行对应的指令。如果没有匹配成功则将指令传递给自然语言处理节点。这个节点处理后得到对应的回答文字,文字发送给语音合成节点。语音合成节点合成语音后通过喇叭播放出来。
整个的结构大致如下面所示
软件安装
首先如果要用来控制导航,你的机器上要安装伽利略导航系统,详细的安装方法可以参照这里
安装语音处理程序
相信信息可以参照: 在小强中使用语音识别和语音合成
安装自然语言处理程序
cd [到你的工作空间的src文件夹中] git clone https://github.com/BluewhaleRobot/xiaoqiang_nlp安装声音指令控制程序
cd [到你的工作空间的src文件夹中] git clone https://github.com/BluewhaleRobot/xiaoqiang_audio_controller开始使用
roslaunch xiaoqiang_audio_controller audio_controller.launch如果没有提示错误那么应该就可以正常使用了。
正常使用的情况下应该会如下显示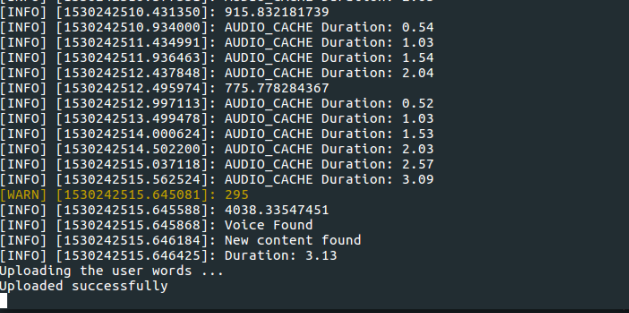
现在对小强说开始导航,就可以听到小强对你回答说正在开启导航。
要使用语音控制导航功能,首先需要使用伽利略导航系统建立一个地图。并且能够保证正常使用。详细的方法可以参照伽利略导航系统的使用
目前支持的语音指令有
- 电压:查询当前的电池电压
- 开启导航: 开始导航程序
- 到xx号点: 到xx号目标点
- 取消,暂停,继续:取消,暂停,继续当前任务
- 关机
常见问题
- 语音识别效果不好
尝试调整launch文件中的min_volum。如果环境噪音比较大尝试调大一些,反之则调小一些。
-
个人体验感觉小强语音当控制指令使用还蛮不错的,聊天的话就不用说什么了,和安卓机语音功能有一拼/🤭
-
此回复已被删除!