ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理
-
@huapiaoxiang21 1.电量和电压成正比,电压数据发布在话题/bw_auto_dock/Batterypower 2.参考包源代码https://github.com/BluewhaleRobot/bw_auto_dock/blob/version2/src/getDockPosition.cpp#L122
-
@xiaoqiang 好的 谢谢大神
-
你好,我们是非小强用户,想入手一套充电桩和充电模块,有几个问题想请问你们:1.充电模块可以检测电池电压或者电量吗,还是说需要我们自己发布电池电量?
2.当电量低于百分之20的时候,这个阈值在哪里改? -
@huapiaoxiang21 可以检测电池电压,电池当前电压测量值发布在/bw_auto_dock/Batterypower话题上。当电量低于20%时,这个需要自己根据电压判断。
-
你好 我的odom发布是一致的,所以把odom 那块删了 小车还是动不了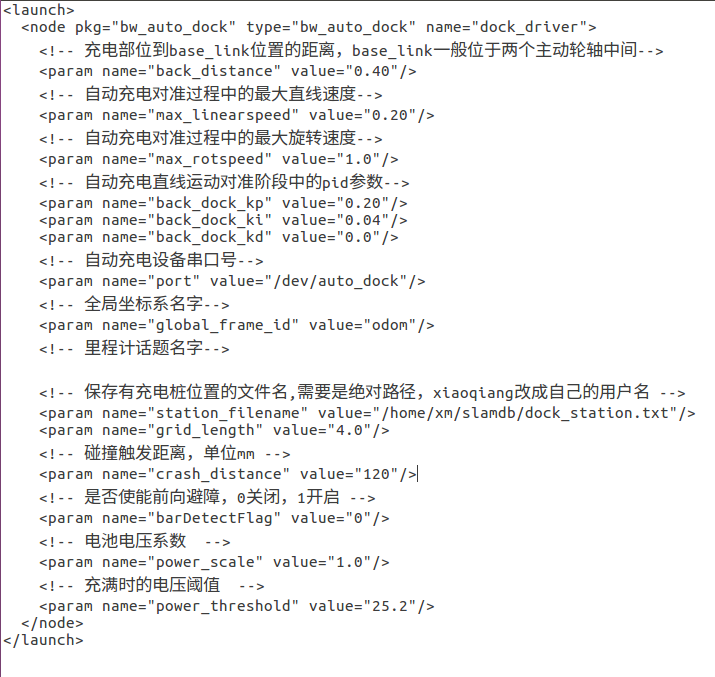
-
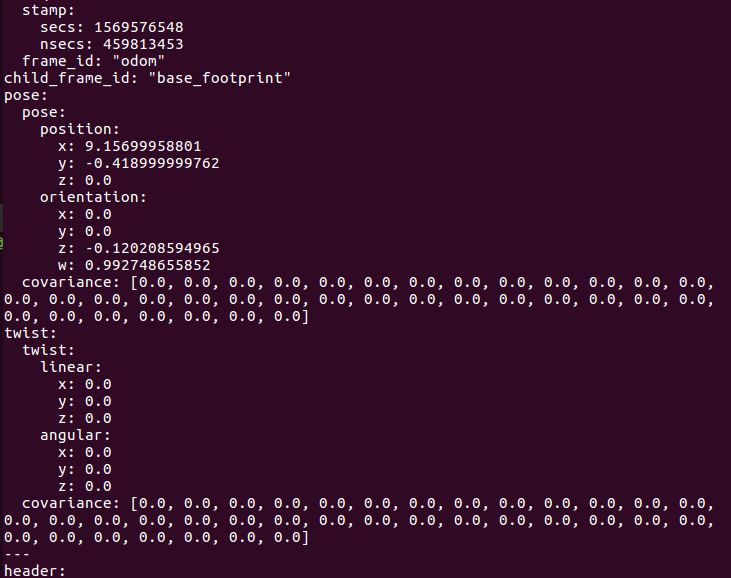
这是我的odom数据 小车控制是cmd_vel -
请问自动充电模块插在电脑上可以启动ROS驱动结点,插在小车上就不能启动了,这是什么原因,权限不够么/
-
@zhangshuoxiao 是不是小车的udev规则没有配置好,出现的错误是什么
-
您好,我在测试的时候有一些问题
当我设置EnableCharge为true之后,我听到了继电器响,并且充电状态Chargestatus变成1了。
但是电流一直是-0.05。
我使用的电池是12v锂电池,标称11.1v,电压范围是10-12.6v
充电底座采用直流稳压电源恒压12.7v供电,恒流模式
电池电压在闭合前是11.6v.
闭合后变为12.3v左右,但是电流一直都是-0.05A
闭合后,充电状态经过几秒重置为2,然后继电器断开。
请问这是怎么回事 是因为直流电源的问题吗 -
@cryingfor 这个好像是硬件问题,需要联系淘宝客服返厂维修了
-
未链接底盘,直接在主机上测试,串口都设为ttyUSB0,txt文件路径设置好,按步骤运行,第一:txt并没有生成保存下来,但各个节点正常启动,ehco电流电压常,cmd_cvl没数据
-
@999js 必须要有里程计数据和充电桩信号
-
@frank 充电桩信号是指“4,1,2”这些值吗,还是黄灯亮起,而且必须要有正常的里程计数据,充电模块才能按上面正常运行是把,谢谢答疑
-
@999js 4 1 2这些值
-
@frank 装到小车后,两个模块接触后,电流为什么没有变化,就是没有充上电,电源data:0一直是这个,位置txt文件也没保存下来,我是大单独买的充电模块。
-
@999js 为什么要有呢
-
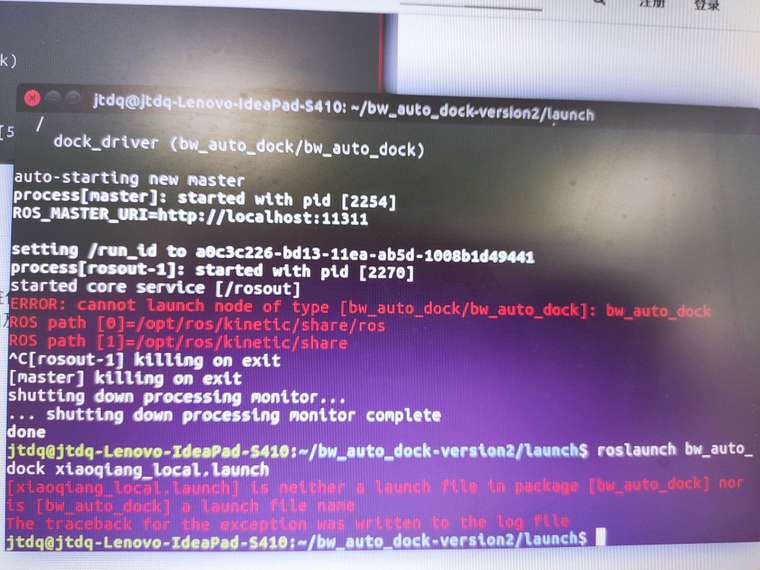
我走到最后一步了,发现打开不了节点
-
@Slim 你的软件包应该没有编译成功。先学习一下ros软件包的基础知识,这个包要放到你自己ros工作空间去编译。
-
@weijiz 我编译成功了 但为什么还是给不了电啊!

-
@Slim 接通开关是充电包控制的,必须下发充电指令对接后才闭合,手动怼上内部开关不会接通。